



版权说明:本文档由用户提供并上传,收益归属内容提供方,若内容存在侵权,请进行举报或认领
文档简介
1、 基本要求:掌握掌握位移法基本结构的确定,位移法典型方程的建立,方程中的系数和自由项的计算,最后弯矩图的绘制。 熟练掌握用位移法计算超静定梁、刚架和排架问题。 重点掌握荷载作用下的超静定结构计算掌握剪力图和轴力图的绘制、利用对称性简化计算。了解温度改变、支座移动下的超静定结构计算。 Displacement MethodDisplacement Methodv位移法基本概念v等截面直杆的杆端力v位移法基本未知量v位移法之典型方程法v无侧移、有侧移刚架算例v位移法之直接平衡法v位移法计算对称结构v支座移动和温度改变1、超静定结构计算的总原则: 欲求超静定结构先取一个基本体系,然后让基本体系在受力
2、方面和变形方面与原结构完全一样。 力法的特点:基本未知量多余未知力;基本体系静定结构;基本方程位移条件 (变形协调条件)。 位移法的特点:基本未知量 基本体系 基本方程 独立结点位移平衡条件?一组单跨超静定梁11-1 位移法的基本概念 因此,位移法分析中应解决的问题是:确定单跨梁在各种因素作用下的杆端力。确定结构独立的结点位移。建立求解结点位移的位移法方程。llqEI=常数ABCAqABCAF1F1=0qABCF1Pql2/12ql2/12ABCAF11AAAlEI4AlEI2AlEI2AlEI4AlEI2AlEI4AlEI4AlEI21221qlFPql2/12F1P4iF11lEIlEIA
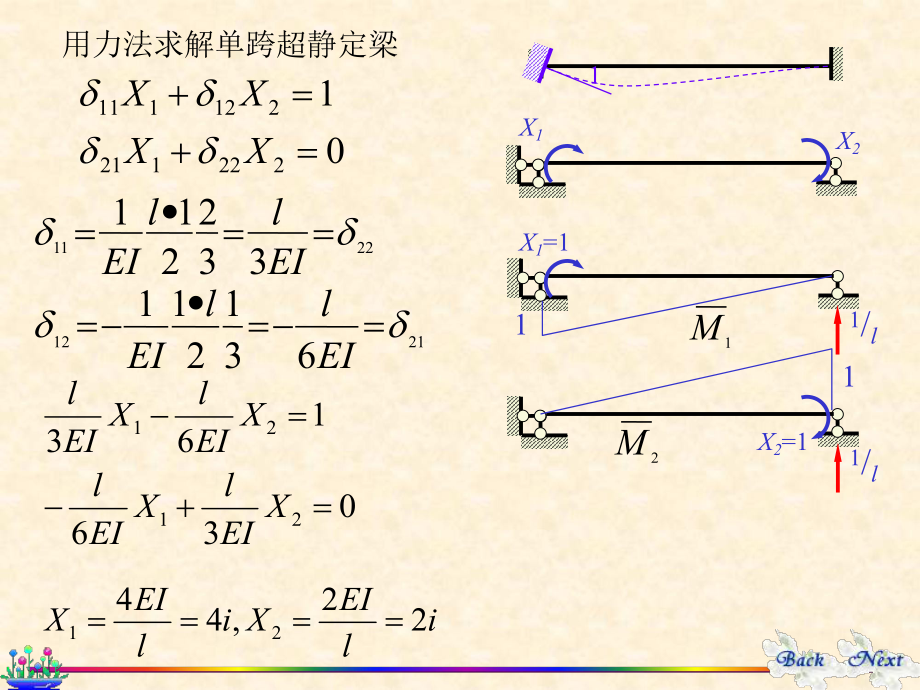
3、A440128021111qllEIFFFAPEIqlA963qABCql2/245ql2/48ql2/4801FAA01FAAAA位移法基本思路ABMABQABQBAMBA1、杆端力和杆端位移的正负规定 杆端转角A、B ,弦转角 /l都以顺时针为正。 杆端弯矩对杆端以顺时针为正 对结点或支座以逆时针为正。用力法求解i=EI/l2、形常数:由单位杆端位移引起的单跨超静定梁的杆端力MAB0MBA014i2iMiMiMBAAB2,411-2 等截面直杆的杆端力(形常数、载常数)杆端转角、杆端弯矩、固端弯矩,都假定对杆端顺时针转动为正号。作用与结点上的外力偶荷载,约束力矩,也假定顺时针转动为正号,而
4、杆端弯矩作用于结点上时逆时针转动为正号。用力法求解单跨超静定梁X1X21/l1/lX2=112M1MX1=1101222121212111XXXXEIllEI6312112112EIllEI332211221110361632121XEIlXEIlXEIlXEIlilEIXilEIX22,4421由单位杆端位移引起的杆端力称为形常数(表11-1)。单跨超静定梁简图MABMBAQAB= QBA4i2i=1ABAB1212lili 6li 6li 6AB10li 3AB=13i023liAB=1ii0li 33、载常数:由跨中荷载引 起的固端力X1=1P / 11 =3ql/81=11X1 + 1
5、P=0ql2/2MPqBmABl,EIlX1=11MDP1EIqlllqlEI84323114211EIlllEI3322132ql2/8082BAABmqlm 各种单跨超静定梁在各种荷载作用下的杆端力均可按力法计算出来,这就制成了载常数表11-2(P5) M图由跨间荷载引起的杆端力称为载常数(表11-2)。单跨超静定梁简图mABmBAAB q212ql212qlABP8Pl8PlAB q28qlABl/2l/2P316Pl004、转角位移方程:杆端弯矩的一般公式:QBAQABMBAMABPMBAMAB=+PliiiMliiiMBABABAABDD642624+mAB+mBA0ABBAABAB
6、QlMMQ0BAQ0ABQBAQABQABMABQABQBAMBA5、已知杆端弯矩求剪力:取杆件为分离体建立矩平衡方程:转角位移方程注:1、MAB,MBA绕杆端顺时 针转向为正。 2、 是简支梁的剪力。0ABQ1、基本未知量的确定:PPCDC 为了减小结点线位移数目,假定:忽略轴向变形,结点转角和弦转 角都很微小。位移法的基本未知量是独立的结点位移;基本体系是将基本未知量完全锁住后,得到的超静定梁的组合体。结点角位移的数目=刚结点的数目PP即:受弯直杆变形前后,两端之间的距离保持不变。结论:原结构独立结点线位移的数目=相应铰结体系的自由度。相应铰结体系的自由度。 =刚架的层数(横梁竖柱的矩形框
7、架)。刚架的层数(横梁竖柱的矩形框架)。2、基本体系的确定:11-3 位移法的基本未知量和基本体系结点转角的数目:7个123相应的铰接体系的自由度=3独立结点线位移的数目:3个 也等于层数 3结点转角的数目:3个独立结点线位移的数目:2个 不等于层数 1位移法基本未知量结点转角独立结点线位移数目=刚结点的数目数目=铰结体系的自由度 =矩形框架的层数在确定基本未知量时就考虑了变形协调条件。注意: 铰处的转角不作基本未知量。杆端为铰支座或铰结点杆件,其杆端力按一端固定一端铰支的单跨超静定梁确定。 剪力静定杆的杆端侧移也可不作为基本未知量。其杆端力按一端固定一端定向支座的单超静定梁(即剪力静定梁)确
8、定。如图示结构中B端的侧移,C端的侧移D点的线位移均不作基本未知量,不需加附加约束。(DE杆是剪力静定杆)。 A B C D E 结构带无限刚性梁时,梁端结点转动不是独立的结点位移。若柱子平行,则梁端结点转角=0,若柱子不平行,则梁端结点转角可由柱顶侧移表示出来。 alD 对于平行柱刚架不论横梁是平的,还是斜的,柱子等高或不等高,柱顶线位移都相等。112112F1F2F1=0F2=0F1PF2Pk211=11 1 2k112=1k22k12位移法基本体系0022221211212111DDDDPPFkkFkkF1=0F2=0F11、F21(k11、k21) 基本体系在1(=1)单独作用时,附加
9、约束1、2中产生的约束力矩和约束力;F12、F22(k12、k22) 基本体系在2(=1)单独作用时,附加约束1、2中产生的约束力矩和约束力;F1P、F2P 基本体系在荷载单独作用时,附加约束1、2中产生的约束力矩和约束力; 位移法方程的含义:基本体系在结点位移和荷载共同作用下,产生的附加约束中的总约束力(矩)等于零。实质上是平衡条件。11-4 位移法典型方程00022112222212111212111D DD D DDD DDnPnnnnnPnnPnnFkkkFkkkFkkkn个结点位移的位移法典型方程 主系数 kii 基本体系在i=1单独作用时,在第 i个附加约 束中产生的约束力矩和约束
10、力,恒为正; 付系数 kij= kji 基本体系在j=1单独作用时,在第 i个 附 加约束中产生的约束力矩和约束力,可正、可负、可为零; 自由项 FiP 基本体系在荷载单独作用时,在第 i个 附加约 束中产生的约束力矩和约束力,可正、可负、可为零;)()1(的弯矩图荷载引起,由载常数作引起的弯矩图由形常数作PiiMMD ;再由结点矩平衡求附加刚臂中的约束力矩,由截面投影平衡求附加支杆中的约束力。15kN/m48kN4m4m2m2miii15kN/m48kN11基本体系F1当F1=015kN/m48kN202036MPM120360F1P=162i4i3ii4i3iik11=8i解之:1=F1P
11、/k11=2/i 利用 PMMMD11叠加弯矩图 1=11628 3030482M图(kN.m)01111DPFkFk11F1P+1D由已知的弯矩图求剪力:0ABBAABABQlMMQ15kN/m48kN4m4m2m2mii1628 3030482M图(kN.m)ABCDkN27241541628kNQBC5 .31248430kNQBA332415416283327+31.5+16.5Q图(kN)由已知的Q图结点投影平衡求轴力:031.5 33NBDNAB0BX=0NAB=0Y=0NBD=64.5校核:B30228MB=02764.516.515kN/m48kNY=27+64.5+16.51
12、5448 =0 位移法计算步骤可归纳如下:(位移法计算步骤可归纳如下:(P P2222)1 1)确定基本未知量;)确定基本未知量;2 2)确定位移法基本体系;)确定位移法基本体系;3 3)建立位移法典型方程;)建立位移法典型方程;4 4)画单位弯矩图、荷载弯矩图)画单位弯矩图、荷载弯矩图; ;5)5)由平衡求系数和自由项;由平衡求系数和自由项;6 6)解方程,求基本未知量;)解方程,求基本未知量;7 7)按)按 M=MM=Mi ii i+M+MP P 叠加最后弯矩图。叠加最后弯矩图。8 8)利用平衡条件由弯矩图求剪力;由剪力图求轴力。)利用平衡条件由弯矩图求剪力;由剪力图求轴力。9 9)校核平
13、衡条件。)校核平衡条件。20kNABC3m3m6mii2kN/mABC16.7211.5792kN/m20kNABC1 1)确定基本未知量)确定基本未知量1 1= =B B ;2 2)确定位移法基本体系;)确定位移法基本体系;3 3)建立位移法典型方程;)建立位移法典型方程;01111DPFk4 4)画)画M M、M MP P; ;由平衡求系由平衡求系 数和自由项;数和自由项;15159F1P15 9 F1P=159=61=12i4i ABC3ik114i 3i k11=4i+3i=7i5 5)解方程,求基本未知量;)解方程,求基本未知量;ikFP761111D6 6)按)按 M=MM=Mi
14、ii i+M+MP P 叠加最后弯矩图叠加最后弯矩图30M图 (kN.m)11.5711.577 7)校核平衡条件)校核平衡条件MB=0MPM111-5 位移法计算连续梁 及无侧移刚架4I4I5I3I3Iiii0.75 i0.5 iiii0.75 i0.5 iABCDEF5m4m4m4m2m20kN/m例:作弯矩图1 1、基本未知量、基本未知量2 2、基本体系、基本体系BAqlm8420822mkN.40BCqlm125201222CBmkNm .7 .41mkN.7 .41CBDD21,F1P=4041.7= 1.7ABCDEF20kN/m0022221211212111DDDDPPFkkF
15、kk3 3、典型方程、典型方程4 4)画)画M MP P 、M Mi i; ;由平衡求由平衡求k kijij、F FiPiP4041.741.7MPM1F2P=41.7ABCDEF3i4i2i3i1.5ik11=4i+3i+3i= 10ik21=2iM2ABCDEF3i4i2i2iik22=4i+3i+2i= 9ik21=2i5 5)解方程,求基本未知量;)解方程,求基本未知量;07 .419207 . 12102121DDDDiiiiii/89. 4/15. 121DDM1ABCDEF3i4i2i3i1.5iABCDEF20kN/m4041.741.7MPABCDEF5m4m4m4m2m43
16、.54046.924.562.514.79.84.93.41.7M图(kN.M)B46.943.53.4 0BMC14.724.59.8 0CM3kN/m8m4m2iii2213kN/m21F1F2F1=0F2=03kN/mF1PF2Pk12k22乘2k11k21乘11=12=1002222121212121111DDDDPPFkkFFkkFF1Pk12k11F1Pk12k11F1Pk12k11F1Pk12k11F2Pk22k21F2Pk22k21F2Pk22k21F2Pk22k21F2Pk22k21 44MP F1P04 F1P=4 F2P=662ql0F2P4i2i6i6i4i k11 i
17、i5 . 146 k11=10i k21=1.5iM1 k12 0 1.5i43i163i k21 k22 M2 k12=1.5i k21=15i/161.5i1.5i0.75i0616155 . 1045 . 1102121DDDDiiii解之:1=0.737/i,2=7.58/i利用 PMMMMDD22111叠加弯矩图 13.624.425.69M图图(kN.m)11-6 位移法计算有侧移刚架 与线位移相应的位移法方程是沿线位移方向的截面投与线位移相应的位移法方程是沿线位移方向的截面投影方程。方程中的系数和自由项是基本体系附加支杆中的影方程。方程中的系数和自由项是基本体系附加支杆中的反力,
18、由截面投影方程来求。反力,由截面投影方程来求。AABAi3mABABABliD31、转角位移方程:liiiMliiiMBABABAABDD642624+mAB+mBAABMABQABQBAMBA两端刚结或固定的等直杆两端刚结或固定的等直杆一端铰结或铰支的等直杆一端铰结或铰支的等直杆033DBAABAABMmliiM一端为滑动支承的等直杆一端为滑动支承的等直杆BAABBAABBAABmiiMmiiMMABAAB11-9 用直接平衡法建立位移法方程MABABABMBA0ABBAABABQlMMQ(4)已知杆端弯矩求剪力已知杆端弯矩求剪力 位移法计算步骤可归纳如下:位移法计算步骤可归纳如下:1 1)
19、确定基本未知量;)确定基本未知量;2 2)由转角位移方程,写出各杆端力表达式;)由转角位移方程,写出各杆端力表达式;3 3)在由结点角位移处,建立结点的力矩平衡方程,)在由结点角位移处,建立结点的力矩平衡方程, 在由结点线位移处,建立截面的剪力平衡方程,在由结点线位移处,建立截面的剪力平衡方程, 得到位移法方程;得到位移法方程; 4 4)解方程,求基本未知量;)解方程,求基本未知量;5) 5) 将已知的结点位移代入各杆端力表达式,得到将已知的结点位移代入各杆端力表达式,得到 杆端力;杆端力;6 6)按杆端力作弯矩图。)按杆端力作弯矩图。4I4I5I3I3I1110.750.5i=1110.75
20、0.5ABCDEF5m4m4m4m2m20kN/m例11-1 作弯矩图1、基本未知量B、C2、列杆端力表达式令EI=1BAqlm8420822mkN.40BCqlm125201222CBmkNm .7 .41mkN.7 .41CCCFM25 . 04BBEBM5 . 175. 02CBCBM7 .4142CBBCM7 .4124BBAM403CCFCM5 . 02BBBEM375. 04CCDM33、列位移法方程0CFCDCBCMMMM0BEBCBABMMMM07 . 1210CB07 .4192CB4、解方程B=1.15 C=4.89=43.5=46.9=24.5=14.7=9.78=4.8
21、9MCBMCDMCF=3.4=1.7ABCDEF5m4m4m4m2m43.54046.924.562.514.79.84.93.41.7M图(kN.M)位移不是真值!5、回代6、画M图MBAMBCMBEB3kN/m8m4m2iiiABCD)2(3iMBBC12434642DiiMBBA12434622DiiMBAB0, 0QQXCDBA0, 0MMMBCBAB43DiMDC045 . 110DiiB1630D ilMQDCCD0616155 . 1DiiBJ6435 . 10DiiQlMMQBBABAABBA解之:=0.74/i=7.58/i=13.89BAQCDQ=4.42=4.44=5.6
22、94.424.4413.895.69M图(kN.m)1、基本未知量B、2、列杆端力表达式3、列位移法方程4、解方程5、回代6、画M图Ph1h2h3I1I2I3作图示刚架的弯矩图。忽略梁的轴向变形。解:1)基本未知量只有2)各柱的杆端剪力侧移刚度J=3i/h2,则:Q1=J1, Q2=J2, Q3=J3Q1+Q2+Q3=PJ1+J2+J3=PDiJPPQ1Q2Q3iihJPJM=Qihii iJPJQP柱顶剪力:柱底弯矩:JhPJ11JhPJ33JhPJ223)位移法方程X=0M结点集中力作为各柱总剪力,按结点集中力作为各柱总剪力,按各柱的侧移刚度分配给各柱。再各柱的侧移刚度分配给各柱。再由反弯
23、点开始即可作出弯矩图。由反弯点开始即可作出弯矩图。仅使两端发生单位侧移时需在两仅使两端发生单位侧移时需在两端施加的杆端剪力。端施加的杆端剪力。在讨论结构上各结点的线位移的关系时可用铰结刚化体系来代替原结构。其原因是两者结点间的几何约束条件是相同的:链杆长度不变。O瞬心在无穷远结论:结论:平行柱刚架不论横梁是平的还是斜的,柱子等高不等高,平行柱刚架不论横梁是平的还是斜的,柱子等高不等高,柱顶的线位移都相等。柱子不平行时,柱顶线位移不相等,但也柱顶的线位移都相等。柱子不平行时,柱顶线位移不相等,但也不独立。不独立。 如杆件两端线位移平行,且不垂直杆轴,则为无侧移杆。如杆件两端线位移平行,且不垂直杆
24、轴,则为无侧移杆。iilPEI=ABCD122liJBD32liJAC54/12/3/12222PlililiPJPJQBDBD5/12/3/3222PlililiPJPJQACACM图PP/5P/5P/5P/54P/5l/2l/24P/54P/54P/5Pl/52Pl/52Pl/5122liJBD32liJAC54PJPJQBDBD5PJPJQACACii8mEI=ABCD10kN/miiEI=ABCD10kN/mR3ql/8=30kNR=30kN=6kN=24kN4m4mR30kN80 6 6 648 24 24 24 96 96 M图(kN.M)12880 96 96 1、剪力静定杆的应
25、用: 剪力静定杆的两端相对侧移可不作为位移法基本未知量。2kN/m2kN/m11-8 位移法计算的简化先由平衡条件求出杆端剪力;将杆端剪力看作杆端荷载,该端滑动,另端固定的杆计算固端弯矩。 剪力静定杆转角位移方程同一端刚结一端定向支承的梁BAABBBABBAABmiiMmiiM 剪力静定杆的固端弯矩计算例题用位移法计算刚架。解:1、求固端弯矩:mkNmBC.12416163mkNmmkNmABBA.362410343.282410643222m2m4m1846M图(kN.m)2m2m4m3kN/m 16kNABC 10kN(EI=C)3kN/m 10kN3628123BABBBABBCiMiM
26、iMiiMMMBBBABCB/1004040即:=18kN.m=18kN.m=46kN.m16ABCDABCDE ABCDEFABCDE llPqP+ql ql按一端固定一端滑动的杆处理的剪力静定杆,并不包括Q, M都静定的静定杆。如右图中的AB,CD杆。12kN/m12kN/m12kN/m12kN/m 24kN/m4m4m4mEIEIEI2EIEI2424 2472724208208M反对称M对称921643252M图(kN.m)482、应用对称性简化计算12kN/m12kN/mX1444M196MP01111DPX12kN/mEIEIEI4m4m6512434963256434111111
27、3311DDPPXEIEIEIEI24 2472M反对称12kN/m12kN/m等代结构2472=112kN/m12kN/m12kN/mEIEI4m4m等代结构ACBMMMACABA0iA2iA0168iMACA2iMAAC4iMAAB164iMABA162=20kN.m=8kN.m=8kN.m=4kN.m2084208M对称12kN/m4m3m4m4m4I4I5I4I5I4m12kN/mi=1i=1ACB ACAM2AACM4ABAM162A164AABM12412420ACABAMMM20168AAMABMACA=8kN.m=20kN.m=8kN.m=4kN.m482024482024M图图(kN.m)1 1)斜梁(静定或超静定)受竖向)斜梁(静定或超静定)受竖向荷载作用时,其弯矩图与同跨度同荷载作用时,其弯矩图与同跨度同荷 载 的 水 平 梁 弯 矩 图 相 同 。荷 载 的 水 平 梁 弯 矩 图 相 同 。2 2)对称结构在对称荷载作用下,)对称结构在对称荷载作用下,与对称轴重合的杆弯矩与对称轴重合的杆弯矩=0=0,剪力,剪力=0=0。 对图示无结点线位移的刚架和刚结桁架,当忽略杆轴向变形的影响时,在结点荷载作用下,各杆的弯矩是否为零。 PPWPPP 基本体系的荷载弯矩图为零,位移法方程的自由项为零,故结点位移全为零,0DPiiM
温馨提示
- 1. 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
- 2. 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
- 3. 本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
- 4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
- 5. 人人文库网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
- 6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
- 7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
最新文档
- GB/T 45283.2-2025工业控制系统人机接口组态文件交互第2部分:基础交互描述
- 复习计划健康管理师试题及答案
- 土木工程地震工程技术试题及答案
- 超星尔雅学习通《剑指CET-4:大学生英语能力基础》2025章节测试附答案
- 社会化内容分享的试题及答案
- 2025年度车辆贷款抵押与二手车鉴定评估服务合同
- 2025年度金融业务员佣金提成合同模板
- 二零二五年度湖北省旅游包车安全责任合同
- 二零二五年度汽车租赁与数据共享协议
- 二零二五年度师徒结对企业文化建设协议
- 2024年4月全国自考00054管理学原理真题试卷及答案
- 2024年中国半导体行业现状分析及发展趋势预测报告(智研咨询)
- 强迫症及相关障碍-138
- 品牌托管合同范本
- 普陀区2024届高三下学期二模考试语文试题(原卷版+解析版)
- 青鸟消防JB-QB-JBF5012火灾报警控制器使用说明书V1.3
- 职业技能培训投标方案(技术方案)
- 2024年四川省南充市重点中学小升初语文入学考试卷含答案
- 合金冶炼有限公司2×33000KVA全密闭硅锰合金矿热炉配套煤气发电项目环评可研资料环境影响
- 公路养护服务服务承诺及其质量保证措施
- 反电信诈骗安全教育课件
评论
0/150
提交评论