



版权说明:本文档由用户提供并上传,收益归属内容提供方,若内容存在侵权,请进行举报或认领
文档简介
1、第三章 应变分析 3-1 位移和(工程)应变3-2 应变张量和转动张量 3-3 应变张量和转动张量的坐标变换式3-4 主应变、主应变方向、应变张量 的三个不变量3-5 变形协调条件(相容条件) 7/24/20221 在第二章我们研究了应力张量本身和体力、面力之间的关系式,即平衡规律。本章将讨论变形体研究的另一个基本关系:变形与位移之间的关系。当然要以小变形假设为基础,位移和形变相对于变形体几何尺寸是微小的。3-1 位移和(工程)应变7/24/202223-1 位移和(工程)应变1.1位移 x2x1x3PoP 有三个分量。 Pu变形体任意点P的位移矢量7/24/202233-1 位移和(工程)应
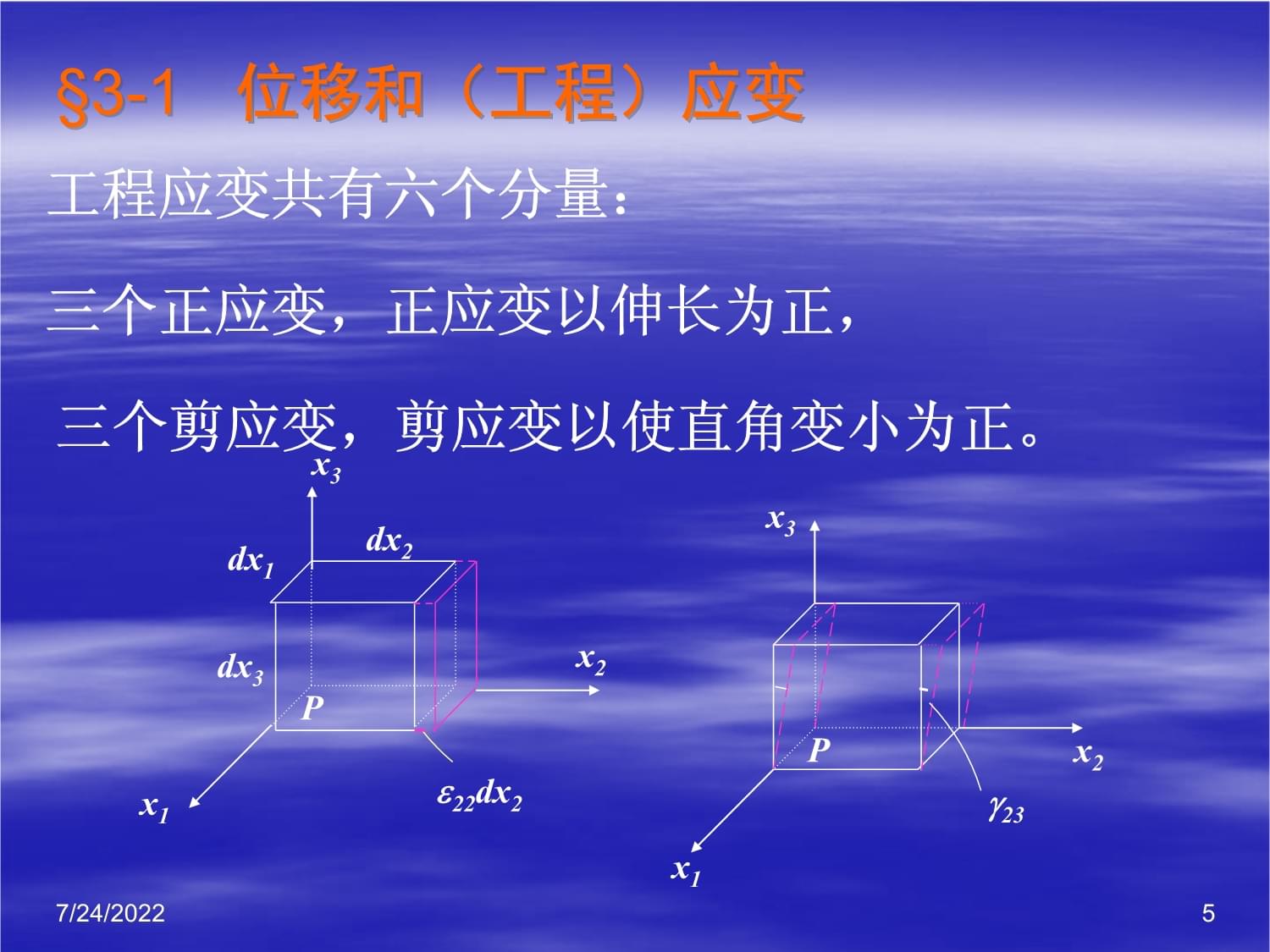
2、变1.2 (工程)应变 工程应变是通常工程中描述物体局部几何变化,分为正应变和剪应变。 ,(角变形)两微元线段夹角的改变量。(工程)正应变:11、22、33 , (工程)剪应变:12=xy、23=yz、31=zx7/24/202243-1 位移和(工程)应变工程应变共有六个分量:x1x2x3P23x1x2x3Pdx1dx2dx322dx2三个正应变,正应变以伸长为正,三个剪应变,剪应变以使直角变小为正。 7/24/202253-2 应变张量和转动张量 应变张量和转动张量是描述一点变形和刚体转动的两个非常重要的物理量,本节将讨论一下它们与位移之间关系,在讨论之前,先介绍一下相对位移矢量和张量.7
3、/24/20226x2x1x3PoP Q3-2 应变张量和转动张量2.1 相对位移矢量和相对位移张量 相对位移矢量 Puu+duQ P Q7/24/202273-2 应变张量和转动张量( a) 而 (b) 将(b)式代入(a)式,得 2.1 相对位移矢量和相对位移张量7/24/202283-2 应变张量和转动张量 根据商法则 令 为一个二阶张量相对位移张量 7/24/202293-2 应变张量和转动张量2.2 应变张量和转动张量 相对位移张量 ui,j 包含了变形和刚体转动,为了将两者分开,对 ui,j 进行整理,张量分成对称和反对称张量之和。 或 7/24/2022103-2 应变张量和转动
4、张量其中 ij = ji(对称张量),ij = -ji (反对称张量) 而 ij 表示变形体的形变,ij 表示了刚体转动。 7/24/2022113-2 应变张量和转动张量 以在平面x1 x2的两个垂直线段PQ、PR的相对位移来说明并直观看一下ij,ij二阶张量表示了形变和刚体转动。PQRx1x2dx1=1dx2=17/24/2022123-2 应变张量和转动张量相对位移 u1 ,1PRQRQx1x2dx1=1dx2=1u1 ,2u2 ,1u2 ,2PQRu1、u2x1x2dx1=1dx2=17/24/2022133-2 应变张量和转动张量11,12= 21,22 纯变形 12= -21 纯转
5、动 12=(u1 ,2 +u2 ,1 ) /222=u2 ,211=u1 ,121= (u2 ,1 +u1 ,2 )/ 2(+)/2+x2 x1 12= (u1 ,2 -u2 ,1 ) /221=(u2 ,1 -u1 ,2 ) /2x2 x1 7/24/2022143-2 应变张量和转动张量2.3 转动张量的对偶矢量 由纯刚体转动可见,12= -21,正好相当于一个沿 x3 轴方向的转动矢量 ,方向为 ,其大小 3:类似可得,其它两个坐标平面转动矢量,7/24/2022153-2 应变张量和转动张量综合三个坐标面的转动矢量 : 为转动张量的对偶矢量。 7/24/2022163-2 应变张量和转
6、动张量比较工程应变定义和应变张量,可得: 7/24/2022173-3 应变张量和转动张量的坐标变换式 在 xk 坐标系中,已知变形体内任一点应变张量 kl 和转动张量 kl ,则在新笛卡尔坐标系xi中此点应变张量ij和 ij 均可以通过二阶张量的坐标转换式求出它们。即: 7/24/2022183-4主应变、应变方向应变张量的三 个不变量 确定一点的主应变和应变主方向方法与求主应力和应力主方向的方法完全一致,求主应变的方程 分别为应变张量的三个不变量。 解出1、2、3 (实根) 7/24/2022193-4 主应变、应变方向应变张量的三个不 体积应变 当 1 2 3 时(三个主应变不相等),三
7、个主方向相互垂直。 变量7/24/2022203-5 变形协调条件(相容条件) 在本章第二节中我们讨论了一点的应变张量,它包含了一点的变形信息,应变张量与位移微分关系称为几何方程(共六个)。如果已知变形体的位移 状态, 则由这六个方程直接求出应变张量,但反之由六个独立的任意 ij求ui不行。7/24/2022213-5 变形协调条件(相容条件) 因为ij 仅包含形变,由其求出位移时,刚体位移是无法确定的,因此,位移 无法确定。 ij 分量之间必须满足一定的条件(方程),才能由几何方程积分求出单值连续的位移场ui、ij的分量必须满足的方程称为变形协调方程或相容方程。7/24/2022223-5
8、变形协调条件(相容条件) 变形协调方程共有六个,可由几何方程直接导出。即: 7/24/2022233-5 变形协调条件(相容条件)7/24/2022243-5 变形协调条件(相容条件)7/24/2022253-5 变形协调条件(相容条件)7/24/2022263-5 变形协调条件(相容条件)7/24/2022273-5 变形协调条件(相容条件)用指标符号表示: 或 用张量表示: 7/24/2022283-5 变形协调条件(相容条件)结论: 应变张量 ij 满足变形协调方程是保证单连域的位移单值连续解存在的必要和充分条件。 对于复连域还需附加补充条件位移单值条件。 单连域:变形体内的任何一条封闭
9、线当缩小时均能变为一点,当不满足时为多连域。 7/24/2022293-5 变形协调条件(相容条件) 对于多连域附加补充条件办法为: 假想通过适当截断,使域为单连域.在截断面 ab 两侧 u+i = u -i即为补充条件。 abu+u -7/24/202230作业: 1. 给定位移分量 u1= cx1(x2+x3)2, u2=cx2(x1+x3)2, u3=cx3(x1+x2)2 此处 c为一个很小的常数,求应变张量ij 和转动张量 ij 。 2. 将直角坐标系绕x3轴转动角,求新坐标系应变分量的转换关系。7/24/202231作业:3. 假定体积不可压缩,位移 u1(x1,x2) 与u2(x1,x2) 很小, u3=0。在一定区域内已知 u1=c(1-x22)(a+bx1+cx12) ,其中a、b、c为常数,且12=0,求 u2(x1,x2)。4. 试分析以下工程应变状态能否存在 (1)11=k(x12+x22) x3 , 22=kx22x3 , 33=0 12=2k x1 x2 x3, 23= 13=0 7/24/202232作业:
温馨提示
- 1. 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
- 2. 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
- 3. 本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
- 4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
- 5. 人人文库网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
- 6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
- 7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
最新文档
- 屋顶花园轻质种植基质铺设施工方案
- 物理注射器题目及答案解析
- 输电导线张力展放施工方案
- 清洁能源供热替代项目技术方案
- 2026年环境影响评价工程师考试备考冲刺模拟试卷含答案解析
- 2026年传染病报告管理培训试卷(答案)
- 2026年数字思维逻辑测试题及答案
- 2026年规范汉字测试题及答案
- 2026年新概念四测试题及答案
- 2026年七道变态测试题及答案
- 2026年湖南公开遴选公务员考试(公务员综合知识)经典试题及答案
- 2026年湖北英语(专升本)真题及答案
- DB44-T 2848-2026 装配式污水处理设施设计建设标准
- 安庆市2025安徽安庆市市直事业单位公开招聘81人笔试历年参考题库典型考点附带答案详解
- GB/T 47427-2026合成纤维预取向丝(POY)动态热应力试验方法
- 2026年广东省汕头市龙湖区中考一模考试地理试题(含答案)
- 设计单位财务制度
- GA/T 2198-2024法庭科学可疑样品中毒品和易制毒化学品定性定量检验方法通用规则
- 郑州市金水区2025-2026学年第二学期三年级语文期末考试卷(部编版含答案)
- 2026年食品安全规章制度目录清单
- 物流公司业务部管理制度
评论
0/150
提交评论