



版权说明:本文档由用户提供并上传,收益归属内容提供方,若内容存在侵权,请进行举报或认领
文档简介
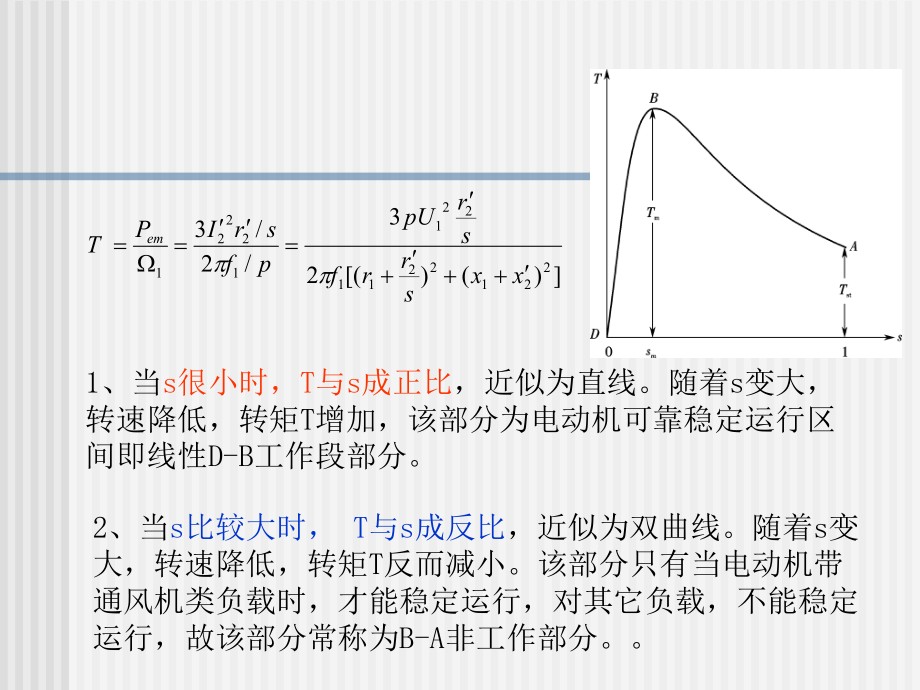
1、第第5章章 三相异步电动机三相异步电动机 拖动与控制拖动与控制 电机拖动与控制电机拖动与控制5.1三相异步电动机的机械特性三相异步电动机的机械特性机械特性是指转速与电磁转矩n=f(T)之间的关系。对于异步电动机,由于转速与转差率之间存在着一定的关系,机械特性亦可表示为T=f(sT=f(s) )。5.1.1固有机械特性的分析固有机械特性是指电动机在额定电压和额定频率下,按规定的接线方式接线,定、转子回路外接阻抗为零时的机械特性。 1、当s很小时,T与s成正比,近似为直线。随着s变大,转速降低,转矩T增加,该部分为电动机可靠稳定运行区间即线性D-B工作段部分。 )()(23/2/322122112
2、2112221xxsrrfsrpUpfsrIPTem2、当s比较大时, T与s成反比,近似为双曲线。随着s变大,转速降低,转矩T反而减小。该部分只有当电动机带通风机类负载时,才能稳定运行,对其它负载,不能稳定运行,故该部分常称为B-A非工作部分。 3 3、机械特性上的几个特殊点、机械特性上的几个特殊点221212)(xxrrsm)(4322121112 1xxrrfpUTm212xxrsm)(432112 1xxfpUTm通常可略去r12 2)最大转矩点最大转矩点B B1 1)同步转速点同步转速点D D电动机过载能力 NmmTT最大转矩与电压平方成正比,临界转差率仅与电动机本身的参数有关,而与
3、电源电压无关。临界转差率与转子电阻成正比,最大转矩与转子电阻无关临界转差率与最大转矩都近似地与短路电抗成反比。它反映了电动机短时过载能力的大小。一般电动机的过载能力=1.62.2,起重、冶金机械专用电动机=2.22.8。起动转矩 起动转矩与电源电压平方成正比。短路电抗愈大,起动转矩愈小。在一定范围内增大转子电阻,则起动转矩增大。3)起动点)起动点A)()(232212211221xxrrfrpUTst起动转矩倍数NststTTk反映起动能力大小。一般笼型异步机的起动转矩倍数为1.02.0,起重和冶金专用的笼型异步机2.84.04)额定运行点)额定运行点C:,一般额定转差率(0.020.06 )
4、三相异步电动机的人为机械特性是指人为地改变电源参数或电动机参数而得到的机械特性。 1降低定子电压时的人为机械特性 5.1.2人为机械特性的分析人为机械特性的分析线性工作段斜率变大,即特性变软。电动机起动转矩倍数和过载能力均显著下降。 1nms不变,mT变小2 2转子串接对称电阻时的人为机械特性转子串接对称电阻时的人为机械特性 转子串接对称电阻, 范围内增加转子电阻,可以增大电动机的起动转矩。1nmTms1ms1ms关于改变电源频率、改变定子绕组极对数的人为机械特性,将在异步电动机调速中介绍。则随外接电阻增大而增大。 特性曲线线性工作段斜率增大,特性变软。不变起动转矩将达到最大。 当串入的电阻使
5、 ,5.1.3电磁转矩的实用表达式电磁转矩的实用表达式)(432112 1xxfpUTmssssTTmmm2)()(23/2/3221221122112221xxsrrfsrpUpfsrIPTem上两式相比并略定子电阻,可得实用公式已知电动机 、NP、Nn,m、 额定转矩为 NNNNNnPPT9550最大转矩为 NmmTT额定转差率为11/ )(nnnsNN 例5-1 一台绕线式异步电动机技术数据如下:)1(2mmNmss用额定运行数据可求出 ,kwPN60VUN380min/577rnNAIN1602VEN25329 . 2m2r实用公式便成为参数已知的机械特性方程式。只要给定一系列的s值,
6、便可求出相应的T值,即可绘出电动机的机械特性曲线。(2)转子串电阻R2=2r2时的人为机械特性方程和起动转矩。试求:(1)固有机械特性方程和起动转矩;解:(1)固有机械特性6095509550577NNNPTn=993.1Nm 116005770.038600NNnnsn22(1)0.038 (2.92.91)0.214mNTTss2 28800.2140.214Tss(2)人为机械特性642. 0214. 0332222mmmssrrrs2 28800.6420.642TSSmNTTNTm28801 .9939 . 25.2 参数的工程计算已知技术数据:(1)额定功率(2)额定电压(3)额定
7、线电流(4)额定转速(5)额定效率(6)额定功率因数(7)过载倍数。对于绕线转子,还给出转子转子额定电压、额定电流 。 NNNnPT9550估算出异步电动机等值电路中的有关参数 (1)额定转矩 (2)最大转矩 NmmTT(3)临界转差率 12mmNmss(4)总电抗 21211243rrTfpUxNmk(5)转子电阻折算值。(6)空载电流 2212xrsrm绕线转子 NNNIUsr2223定、转子的相数相同, 22rrkkie)coscos1(212111210NNNNsrrxxtgII(7)定子电抗及转子电抗的折算值 对大、中型异步电动机可取 xxx5 . 021对100千瓦小型机可取: x
8、x67. 02xx57. 02(2、4、6极电机) (8、10)极电机 对于绕线转子异步电动机。(8)励磁阻抗 023IUkzNem对于笼型转子异步电动机 定子Y联结 01395. 0IUzNm定子联结 01395. 0IUzNm定子电阻估算 Y联结 联结 NNNIsUr111395. 0NNNIsUr111395. 0例5.2 一绕线转子异步电动机定子绕组为Y联结,其技术数据为:。试用工程计算法计算下列参数: (1) mNmNnPTNNN1313124033095509550(2) mNmNTTNm24949131319 . 1max(3) 04. 025024025011nnnsNN(4)
9、 028. 0410349504. 03222NNNIUsr(5) 141. 019 . 19 . 104. 0122mmNmss,kwPN330,VUN6000,min/240rnN,878. 0,77. 0cos1N, 9 . 1m,4952VUNAIN4102,NT,mT,ms,kx,iekk,0I,21xxmz(6) 5 .248 . 28 . 2131319 . 1412)3/6000(4222212112rrTfpUxNm(7) 48. 35 .248 . 2141. 0222212xrsrm(8) 15.11028. 048. 322rrkkie(9) 25.125 .245 .
10、 05 . 021xxx(10) AAtgIINNNN7 .20)258. 077. 064. 0(47)cos(sin21110(11) 1547 .20349515.11302IUkzNem8 . 2395. 0111NNNIsUr5.3三相笼型异步电动机的起动与控制三相笼型异步电动机的起动与控制 对电动机起动性能的要求如下:2)在满足起动转矩要求的前提下,起动电流越小越好。1)有足够大的起动转矩(大于负载转矩)。一般希望起动越快越好,以提高生产效率。5)起动过程中功率损耗越小越好。3)起动平滑,以减小对生产机械的冲击。4)起动设备安全可靠,力求结构简单,操作方便。过大的起动电流:对电网而
11、言,线路压降大,影响同一电网上其他负载;对电动机本身,损耗大,发热,加速绕组绝缘老化,易发生位移和变形,造成短路事故。但由于起动时的转差率(s=1)远大于正常运行时的转差率(s=0.020.06),转子的功率因数很低;ststmtstICT22cos一般笼型异步机起动电流可达额定电流的(47)倍。因此,起动转矩不大,一般Tst=(0.81.5)TN。其次,由于起动电流大,定子绕组漏阻抗压降大,使定子绕组感应电势减小,导致对应的气隙磁通量减小。一、直接起动(全压起动)将电动机定子绕组通过开关或接触器直接接入电源,在额定电压下进行起动。三相笼型异步电动机的直接起动与控制三相笼型异步电动机的直接起动
12、与控制刀开关控制和断路器控制电路手动合上Q,电动机M工作;手动切断Q,电动机M停止工作。保护措施:a)图FU-短路保护b)图 过载的热保护和过电流保护 适用于不频繁起动的小容量电动机。 2.接触器控制电路 主电路主电路:三相电源经QS、FU1、KM的主触点,FR的热元件到电动机三相定子绕组。控制电路控制电路:用两个控制按钮,控制接触器KM线图的通、断电,从而控制电动机(M)启动和停止。起动过程起动过程:合上QS,按起动按钮SB2KM线圈通电并自锁M通电工作。KM自锁触点:通电状态的自我锁定(自保电路)。具有自保电路的接触器控制具有欠电压与失电压保护作用。 停止按钮SB2,用于切断KM线圈电流并
13、打开自锁电路,使主回路的电动机M定子绕组断电停止工作。3.点动控制电路 图a为既可实现电动机连续运转又可实现电动机点动控制的电路,由手动开关SA来选择。当SA闭合时为连续控制,SA断开时为点动控制 。图b为用连续运转按钮SB2、点动按钮SB3来选择连续与点动,点动控制是用SB3按钮的常闭触头断开自保电路实现。4.可逆运行控制电路 倒顺转换开关控制电动机正反转电路。图a为倒顺开关手动操作控制电动机正反转,由于倒顺开关无灭弧装置,适用于5.5kW以下的小容量电动机 。对于5.5kW以上的电动机,则用图b来控制,引入倒顺开关预选电动机旋转方向,而由接触器来接通与断开电源,实现电动机的起动与停止。 5
14、.互锁控制的可逆运行电路 主电路由正反转接触器KM1、KM2的主触头来改变电动机相序,实现电动机的可逆运行。将KM1、KM2正反转接触器的常闭触头串接在对方线圈电路中,形成相互制约的电气互锁控制。 图a所示构成了正停反或反停正的操作顺序。 图b实现电动机正、反转之间直接转换控制,具有电气、机械双重互锁控制 。6.自动往复运行控制电路自动往复运行控制电路 在工作台的固定部件和移动机构上分别装置的行程开关和档铁(压动行程开关用),当移行机构运动到某一固定位置时,压动行程开关,取代人手接动按钮的功能,实现自动循环控制。图SQ1用于正转(工作台向左),SQ2用于反转(向右), ,SQ3、SQ4的常闭触
15、点用于极限位置的保护。自动往复运行控制电路自动往复运行控制电路 二、减压起动二、减压起动一次侧接电网,二次侧接电动机定子绕组。电动机定子绕组得到的电压是自耦变压器的二次电压 。自耦变压器的电压比自耦变压器绕组自耦变压器绕组一次与二次电流关系为 kII/21二次侧起动电流为 2stI,为直接起动时起动电流 kIst2/kIIstst电网供给的一次侧起动电流 减压起动转矩 2/kTTstst2121/NNUUk1.自耦减压起动器电路自耦减压起动器电路 按动SB2KM1线圈通电自锁电动机M自耦补偿起动; KT线圈通电延时时间到-KA线圈通电自锁KM1、KT线圈断电-KM2线圈通电电动机M全压运行。2
16、.Y-2.Y- 降压起动降压起动对正常运行定子绕组接成的三相笼型异步电动机 。起动时,定子绕组采用Y连接,电动机相电压只为正常工作电压3/1待电动机转速接近额定转速时,再将电动机定子绕组改为连接。各相绕组承受额定工作电压,电动机进入正常运转。思考:线、相电压(电流)的关系由于定子绕组接成起动,相电压为额定电压。每相绕组中的起动电流为 则线路起动线电流 1/3ZUINstY联结减压起动时,线电流等于相电流,则线路起动电流 )3/(1ZUINstYststYII31ststYTT31Y-Y- 降压起动控制电路降压起动控制电路主电路分析:KM1、KM2Y起动,KM1、KM3运行。 按下起动按钮SB1
17、KM1线圈通电自锁 KM2线圈通电-M作Y接起动; KT线圈通电延时时间到KM2线圈断电 KM3线圈通电自锁-M作接行。 KT线圈断电复位。KT延时动作时间就是电动机联成星形减压起动时间。 用两接触器和一个时间继电器实现Y-起动的控制电路,适用于13kW以下电动机的控制。KM1为线路接触器,KM2为星-三角转换接触器,KT为减压起动时间继电器。例5-2 一台三相笼型异步电动机,kwPN75VUN380min/1470rnN,7 .135AIN定子三角形联结,起动电流倍数6, 起动转矩倍数1.0,带半载起动,电网容量为1000kVA,试选择适当的起动方法。解 (1) 直接起动电网允许直接起动条件
18、是 08. 4751000341341电动机容量电网容量故不能采用直接起动。 小于6(2)Y-起动NNNIststYIIIkII26313131NNNstststYTTTkTT33. 0313131NstTT5 . 0不能采用Y-降压起动。 (3) 自耦变压器起动电压抽头比为80%、65%和50%的起动补偿器。选用50%抽头时25 . 01kNNststIIIkI5 . 1621122TTTTkTNNstst5 . 025. 0121122起动转矩不能满足要求。选用65%抽头时,计算与上相似,起动转矩也不满足要求。 选用80%抽头 25. 180. 01kNNNstIIII484. 3625.
19、 112TTTTNNst5 . 064. 0125. 112选用80%抽头,起动电流和起动转矩均满足要求 三、软起动以上几种传统的降压起动方法,共同点是转子升至一定转速时切换到全压运行,电路简单。若切换时刻把握不好,就会造成起动过程不平滑且冲击较大。目前,在电力拖动中应用广泛的有两种方法:一是变频器起动;二是软起动。软起动器是一种集电动机软起动、软停车、轻载时节能和多种保护功能于一体的新颖电动机控制装置 。软起动器本质是一种由三相反并联晶闸管及其控制线路组成的交流调压器。 原理是:在起动过程中,通过控制移相角来调节定子电压,并采用闭环限制起动电流,确保电压、电流或转矩按设定曲线变化,直至起动结
20、束。然后可将软起动器切除,使得电动机与电源直接相连。 典型电子式软起动器框图软起动控制器在软起动控制器两端并联KM3 该电路优点:在电动机运行时时可避免软起动器产生的谐波;软起动器仅在起动、停车时工作,可以避免长期运行使晶闸管发热,延长了使用寿命;一旦软起动器发生故障,可由旁路接触器应急备用。 用一台软起动器对两台电动机的起动、停机的电路,但不能同时起动或停机,只能一台分别起动、停机。 三. 深槽式和双笼型异步电动机从笼型异步电机转子槽形着手,利用集肤效应实现起动过程中转子电阻的自动调节,即起动时转子电阻大,正常运行时电阻又自动减小,具有这种改善起动性能的笼型电机有深槽式和双笼型异步电动机。
21、1.深槽式异步电动机导条中靠近槽底处的电流密度很小,而越靠近槽口则越大,因此沿槽高的电流密度分布(b)图,这种现象称为电流的集肤效应。 2.双笼型异步电动机上笼导条截面积较小,并用黄铜或铝青铜等电阻系数较大的材料制成,电阻较大;下笼导条的截面积较大,并用电阻系数较小的紫铜制成,电阻较小。 正常运转时,转子电流频率很低,转子漏电抗远比电阻小,上、下笼的电流分配决定于电阻,于是电流大部分从电阻较小的下笼流过,产生正常运行时的电磁转矩,所以把下笼称为运行笼。 起动时,转子电流频率较高,转子漏电抗大于电阻,上、下笼的电流分配主要决定于漏电抗。上笼称为起动笼。 5.4三相绕线转子异步电动机的起动与控制三
22、相绕线转子异步电动机的起动与控制 在绕线式转子回路串入适当电阻,既能限制起动电流,又能增大起动转矩,克服了笼型异步电机起动电流大、起动转矩不大的缺点,适用于大、中容量异步电动机重载起动。绕线式异步电动机的起动分为转子串电阻和转子串频敏变阻器两种起动方法。一、转子串电阻起动与控制要在起动过程中获得的加速转矩比较大、起动时间短,起动过程较平滑,应串入多级对称电阻,采用逐级切除(短接)起动电阻的方法。这与直流电动机电枢串电阻起动相类似,称为电阻分级起动。 1.启动过程 主电路: R1R3为转子外串电阻; KM2KM4为短接转子电阻的接触器。沿曲线AB加速C沿曲线CD加速E沿曲线EF加速G沿曲线GH加
23、速到H点稳定运行,启动过程结束。一般取尖峰转矩 mTT)(85. 07 . 01切换转矩 LTT)(2 . 11 . 122.启动控制实现 起动条件起动条件:KM2、KM3、KM4均为原态时,方可起动。 起动控制电路起动控制电路: 按动SB2KM1线圈自锁电动机M串全电阻起动,同时KT1线圈通电延时KM2线圈通电切除R3,同时KT线圈通电延时KM3线圈通电切除R,同时KT3线圈通电延时KM4线圈通电自锁切除R1, KT1,KM2,KT2,KM3,KT3等线圈依次断电复位,启动过程结束。按时间原则控制绕线转子串电阻起动电路 按电流原则控制的转子串电阻起动电路 主电路: R1R3转子外串电阻; K
24、I1KI3转子电流检测用电流继电器(欠流复位型)。按动SB2KM4线圈通电自锁KA线圈通电、转子串全电阻起动。转速n,电流I过流继电器KI1复位KM1线圈通电切除转子电阻R3。类推切除R2R3。2.转子串频敏变阻器起动频敏变阻器是一种无触点的电磁元件,它的铁心由较厚的铸铁板或钢板叠成三柱式,在铁心上分别套有线圈连成星形,并与绕线异步电动机的转子绕组相串联。它是一个铁损很大的三相电抗器,由于它的等效电阻随通过电流的频率变化而变化,故称频敏变阻器。 频敏变阻器起动控制电路 5.5三相异步电动机的调速与控制三相异步电动机的调速与控制要改变异步电动机转速,有以下三种方法:改变定子磁极对数 ;改变电源频
25、率 ;改变转差率。一、变极调速通常是利用改变定子绕组接法来改变极数,这种电机称为多速电机,变极调速只适用于笼型转子电动机,因为其转子的极数能自动地与定子极数相适应。 顺向串联 反向串联 反向并联 常用的变极接线方式单星形改接成双星形(Y/YY)变极接线原理图 三角形改接成双星形(/YY)变极接线原理图 两种接线方式都是使每相中半个绕组电流变向,因而电动机极对数减少一半。 当改变定子绕组接线时,必须同时改变定子绕组的相序,以保证调速前后电动机的转向不变。 因为电角度=p机械角度,当p=1时,三相绕组在空间分布的电角度依次为0、120、240;而当p=2时,三相绕组在空间分布的电角度变为0、120
26、2 = 240、2402 = 480(即120)。 可见,变极前后三相绕组的相序发生了变化,因此变极后只有对调定子的两相绕组出线端,才能保证电动机的转向不变。 变极调速的性质和机械特性设变极前后的功率因数和效率都不变,为了确保电动机得到充分利用,每相半个绕组中电流均为额定电流。 1.Y-YY联结方式 当接成星形时,电动机的输出功率为 11cos33NNYIUP 改成双星形后电动机的输出功率为 11cos233NNYYIUP2cos33cos2331111NNNNYYYIUIUPP可见,由Y改接成YY后,电动机的输出功率增加一倍,但转速也增加一倍,由于因此转矩不变,适用于恒转矩负载如起重机、传送
27、带等 。 恒转矩变极调速的机械特性图 2.-YY联结方式 11cos3NNIUP 111cos233NYYIUP15. 132cos3cos233111111NNYYIUIUPP改接前后,电动机的输出功率变化很小,所以转矩几乎减小一半,适用于恒功率负载如各种机床粗、精加工等。 恒功率变极调速的机械特性 变极调速时,转速几乎是成倍变化,所以调速的平滑性差。但它在每个转速等速运转时,和普通异步电动机一样,具有较硬的机械特性,稳定性较好。变极调速既可用于恒转矩负载,又可用于恒功率负载,所以对于不需要无级调速的生产机械,可采用多速电动机拖动。双速电动机控制电路 主电路分析:KM1KM2、KM3YY控制
28、电路:在高速运行时,先低速起动,后高速(YY)运行,以减少启动电流。o选择开关SA合向高速”2”的位置时间继电器KT线圈通电延时KM1线圈通电,电动机M作低速启动。 KT延时时间到KM1线圈断电复位KM2、KM3线圈通电电动机M作YY接法高速运行。二、变频调速变频调速是改变电动机定子电源频率来实现调速。)1 (60)1 (11spfsnn11fnn调节电源频率,就可以平滑地改变电动机的转速,以电源50Hz为基频,既可向下调,也可向上调。 1低于基频向下调速mNKNfEU1111144. 4当降低电源频率 ,则主磁通将增加,这将导致磁路过分饱和,励磁电流增大,功率因数降低,铁心损耗增大。 要保持
29、U1/f1=常数,以维持主磁通不变,即恒压频比。 在不同频率下,当电流为额定电流,其输出转矩为额定转矩,所以采取U1/f1之比为常数的变频调速控制方法称为恒转矩调速,适用于恒转矩负载。 2112121121)(83)(43fULLpxxfpUTm常数pfLLfrnsnmm12112160)(2只要保持电压与频率成正比调节,在调速过程中,电动机最大转矩和转速降不变,机械特性随频率的降低而向下平移 。上面分析最大转矩中忽略了定子电阻,实际上,随着频率降低,最大转矩将减小。 在低速时为保证电动机有足够大的值,电压应比频率降低的比例小一些,使U1/f1的值随的降低而略有增加 。2高于基频向上调速应保持
30、NUU 1,则当频率增加时,主磁通将减小。 如果定义在额定电流下的输出转矩为额定转矩,则在不同频率下的额定转矩随频率增加而减小,因而转矩与转速的乘积,即额定输出功将大致恒定。 这种高于额定频率的调速属于恒功率调速,适用于恒功率负载。 变频器电机变频器一体化产品电机变频器一体化产品采用变频调速例5-2 一台三相笼型异步电动机,VUN380,30AINmin/1455rnN带动0.8倍额定恒转矩负载,要求转速1000r/min。已知变频电源电压与频率成正比调节。求:此时变频电源输出线电压与频率各为多少。03. 015001455150011nnnsN024. 003. 08 . 0NNLLsTTs
31、min/361500024. 01rnsnLLmin/10363610001rnnnHznpf53.3460103626011VffUUNN4 .26253.345038011三、改变转差率调速三、改变转差率调速ssTssssTTmmmmm22改变定子电压、转子串电阻及串级调速等。改变转差率调速,低速时转子铜耗大,所以效率低,经济性差(除串级调速外)。1转子串电阻调速 LmLmTssTssLmLmTssTss21 rTsTsRLLBAsrRsr212LLTsrRTsr22若负载不变,调速前后稳态时转差率之比等于转子电阻之比。221rrRssAB例5-3 一台绕线式异步电动机:kwPN75VUN
32、380,7 .135AIN试求:(1)转子串入电阻0.5欧,电机运行的转速是多少? min/1470rnN,4952VUNAIN4102, 9 . 1m(2)额定负载转矩不变,转速降至500 r/min,转子每相应串多大电阻? 解:(1)额定转差率 027. 015001460150011nnnsN0536. 01163399027. 03222NNNIEsr0299. 05 . 05536. 0112NBsRRrs14551500)0299. 01 ()1 (1nsnBB(2)转子串电阻后转差率667. 01500500150011nnnsB27. 10536. 01027. 0667. 0
33、121rssRNB在转子回路串入一个可控的外加电压电源,其频率与转子频率相同,其相位与转子电势反向或同相。 2、串级调速2222222222222)(xsrsUEsxrUsEI式中“”号表示转子电势与外加电压反相,“+”号表示两者同相。 当外加电压与转子电势同相位,电动机开始加速运行。随着转速增加,转子电流、电磁转矩也随之下降,一直到转速升到某个值,电磁转矩回升到与负载转矩相等,加速过程结束,电动机在此高速下稳定运行。当外加电压幅值增加到一定值时,电动机转速将超过同步转速,称为超同步串级调速 。当外加电压与转子电势相位相反时,电动机转速将下降。称为低同步串级调速。低同步串级调速系统低同步串级调
34、速系统3. 双馈调速为了能发电运行,转子中能量的流动应是双向的,即低于同步转速发电时,能量流入转子,高于同步转速发电时,能量流出转子。在低同步转速下可以发电(亦可电动),在超同步转速下可以电动(亦可发电),成为真正意义上的双馈调速。 变速恒频(VSCF)发电系统 定子输出功率等于轴上输入的机械功率与转子输入的电功率(可正可负)之和。 4. 定子降压调速普通异步电动机降压调速,适用于轻载调速场合。在不同电压下的稳定工作点分别为C、D、E,改变定子电压可以获得较低的稳定运行速度。 对于风机、泵类负载,电动机在全段机械特性上都能稳定运行。 对于高转差率异步电动机,则可得到较宽的调速范围。但低速时的机
35、械特性太软,低压时过载能力也较差。 为提高调压调速机械特性的硬度,增大调速范围,可采取:一是采用速度反馈闭环控制,二是将调压调速与变极调速相结合。具有速度反馈的异步电动机调压调速系统 5.6制动与控制制动与控制一、能耗制动1.能耗制动基本原理实现方法是断开正在运转的三相异步电动机的交流电源,然后向定子绕组通入直流电流。 这种将负载能量(动能和位能)通过电动机转化为电能,并消耗在转子回路电阻上,所以称为能耗制动。 设电动机工作在A点,在制动瞬间,工作点由A点平移至能耗制动特性曲线2上的B点,在制动转矩和负载转矩的共同作用下,电动机开始减速,直到原点。 如是位能性负载,当转速过零时,若要停车,必须
36、用机械抱闸将电动机轴刹住,否则电动机将在位能负载作用下倒拉反转,直到进入第四象限中的C点 。可匀速下降重物。 转子电阻相同而通入不同的直流,能耗制动机械特性曲线有何变化 (比较1、2曲线)。 通入相同的直流但转子电阻不同,能耗制动机械特性曲线有何变化 (比较1、3曲线)。 转子电阻较小时(曲线1),初始制动转矩比较小。 对于笼型异步电动机,为了增大初始制动转矩,就必须增大直流电流(曲线2)。 对绕线异步机,采用转子串电阻来增大初始制动转矩(曲线3),既限制电流又得到较大的制动转矩。 054II)(032II)(2223)4 . 02 . 0rIERNN (按时间原则控制的单向运行能耗制动电路 按速度原则控制的可逆运行能耗制动电路 异步电动机定子旋转磁场的旋转方向与转子的旋转方向相反时,电动机便处于反接制动状态。 二是保持定子磁场的转向不变,而转子在
温馨提示
- 1. 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
- 2. 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
- 3. 本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
- 4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
- 5. 人人文库网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
- 6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
- 7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
最新文档
- 2026浙江宁波前湾控股集团有限公司第1批次人员招聘笔试备考试题及答案解析
- 2026年陕西⼈⺠艺术剧院有限公司招聘(2人)笔试备考题库及答案解析
- 2026年安阳学院单招综合素质笔试备考试题含详细答案解析
- 2026贵州筑春酒业有限责任公司招聘销售人员笔试备考题库及答案解析
- 2026年江西科技职业学院单招职业技能考试模拟试题含详细答案解析
- 2026山东日照航海工程职业学院招聘52人笔试备考题库及答案解析
- 2026年湖北生态工程职业技术学院单招职业技能考试备考试题含详细答案解析
- 2026丽水松阳华数广电网络有限公司见习生招聘5人笔试备考题库及答案解析
- 2026年青岛港湾职业技术学院高职单招职业适应性测试备考试题及答案详细解析
- 2026年青岛市卫生健康委员会直属事业单位公开招聘卫生类岗位工作人员(383名)笔试备考试题及答案解析
- 《老年人照料设施建筑装饰装修设计规程》上网征求意见稿
- 2026年及未来5年市场数据中国航空复合材料市场运行态势及行业发展前景预测报告
- 人教版七年级数学寒假作业(每日一练)
- 柴油机启动课件
- 动物医学毕业论文
- 2025年全国高校辅导员素质能力大赛基础知识测试卷及答案
- 2026年沈阳职业技术学院单招职业适应性测试必刷测试卷必考题
- 《机车运用与维护》第三章 铁路行车信号
- (2025年标准)预存消费协议书
- 养老院入住合同协议书
- 耐磨钢的应用现状及行业发展分析
评论
0/150
提交评论