



版权说明:本文档由用户提供并上传,收益归属内容提供方,若内容存在侵权,请进行举报或认领
文档简介
1、SIFT算法分析1SIFT主要思想SIFT算法是一种提取局部特征的算法,在尺度空间寻找极值点,提取位置,尺度,旋转不变量。2SIFT算法的主要特点:a)SIFT特征是图像的局部特征,其对旋转、尺度缩放、亮度变化保持不变性,对视角变化、仿射变换、噪声也保持一定程度的稳定性。b)独特性(Distinctiveness)好,信息量丰富,适用于在海量特征数据库中进行快速、准确的匹配。c)多量性,即使少数的几个物体也可以产生大量SIFT特征向量。d)高速性,经优化的SIFT匹配算法甚至可以达到实时的要求。e)可扩展性,可以很方便的与其他形式的特征向量进行联合。3SIFT算法流程图:输入图像4SIFT算法
2、详细1)尺度空间的生成尺度空间理论目的是模拟图像数据的多尺度特征。高斯卷积核是实现尺度变换的唯一线性核,于是一副二维图像的尺度空间定义为:L(x,y,)G(x,y,)I(x,y)22c其中G(x,y,)是尺度可变图斯函数,G(x,y,)2e(y)/22(x,y)是空间坐标,是尺度坐标。大小决定图像的平滑程度,大尺度对应图像的概貌特征,小尺度对应图像的细节特征。大的值对应粗糙尺度(低分辨率),反之,对应精细尺度(高分辨率)。为了有效的在尺度空间检测到稳定的关键点,提出了高斯差分尺度空间(DOGscale-space。利用不同尺度的高斯差分核与图像卷积生成。D(x,y,)(G(x,y,k)G(x,
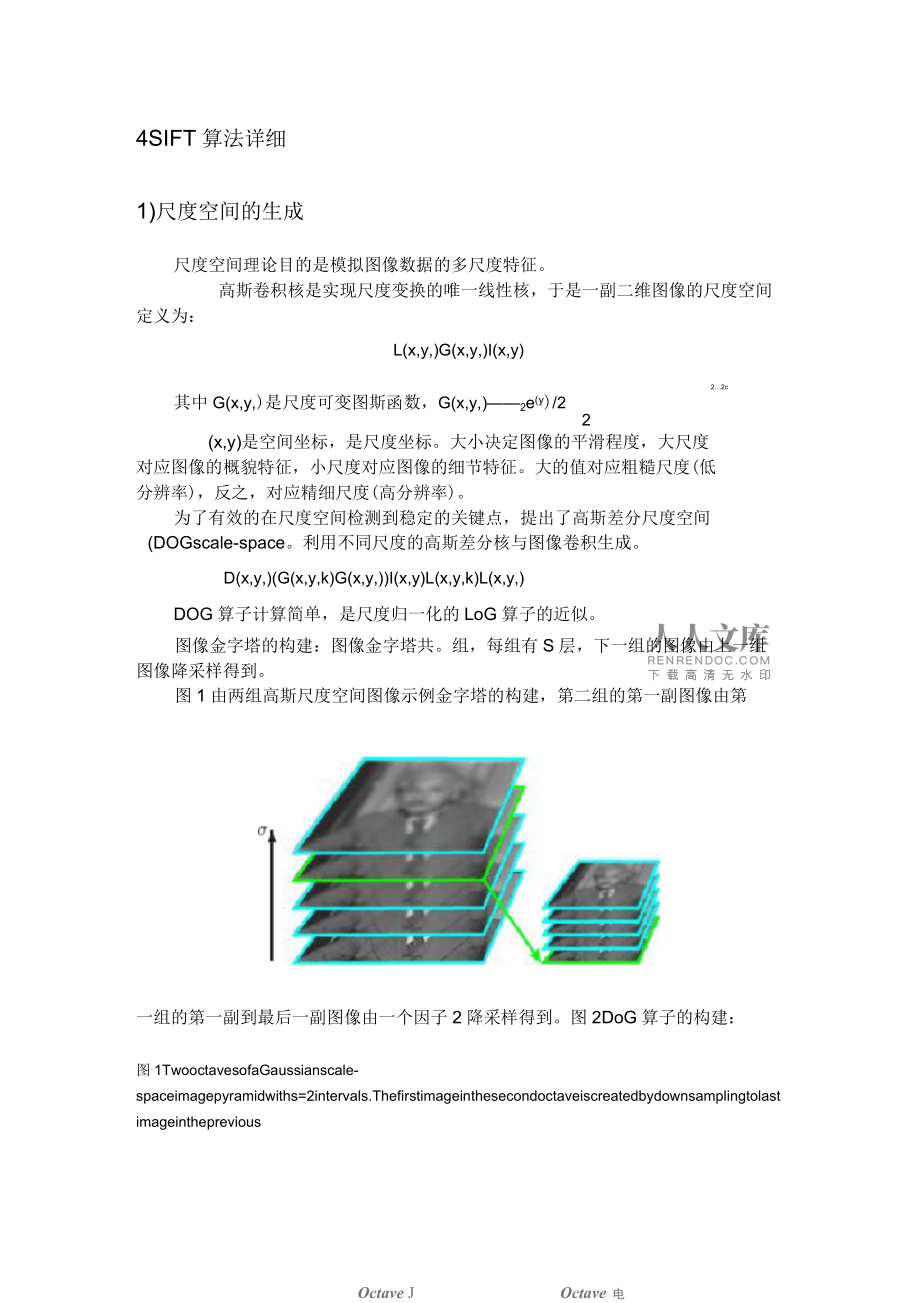
3、y,)I(x,y)L(x,y,k)L(x,y,)DOG算子计算简单,是尺度归一化的LoG算子的近似。图像金字塔的构建:图像金字塔共。组,每组有S层,下一组的图像由上一组图像降采样得到。图1由两组高斯尺度空间图像示例金字塔的构建,第二组的第一副图像由第一组的第一副到最后一副图像由一个因子2降采样得到。图2DoG算子的构建:Octave JOctave 电图1TwooctavesofaGaussianscale-spaceimagepyramidwiths=2intervals.Thefirstimageinthesecondoctaveiscreatedbydownsamplingtolasti
4、mageinthepreviousOctave1DoGOctave1图2ThedifferenceoftwoadjacentintervalsintheGaussianscale-spacepyramidcreateanintervalinthedifference-of-Gaussianpyramid(showningreen).2)空间极值点检测为了寻找尺度空间的极值点,每一个采样点要和它所有的相邻点比较,看其是否比它的图像域和尺度域的相邻点大或者小。如图3所示,中间的检测点和它同尺度的8个相邻点和上下相邻尺度对应的9X2个点共26个点比较,以确保在尺度空间和二维图像空间都检测到极值点。一
5、个点如果在DOG尺度空间本层以及上下两层的26个领域中是最大或最小值时,就认为该点是图像在该尺度下的一个特征点,如图1所示。图3DoG尺度空间局部极值检测3)构建尺度空间需确定的参数一尺度空间坐标Ooctave6标Ssub-level坐标和O、S的关系(o,s)02os/S,oomin0,.,O1,s0,.,S1其中0是基准层尺度。ooctav整标,ssub-level坐标。注:octaves的索引可能是负的。第一组索引常常设为0或者-1,当设为-1的时候,图像在计算高斯尺度空间前先扩大一倍。oXo,0空间坐标x是组octave的函数,设x0是0组的空间坐标,则,x00,.,N010,.,M0
6、1如果M°,N。是基础组o=0的分辨率,则其他组的分辨率由下式获得:N。No20 ,MoM。注:在Lowe的文章中,Lowe使用了如下的参数:n0.5,01.621/S,omin1,S3n 1) o在组o=-1,图像用双线性插值扩大一倍(对于扩大的图像4)精确确定极值点位置通过拟和三维二次函数以精确确定关键点的位置和尺度(达到亚像素精度),同时去除低对比度的关键点和不稳定的边缘响应点(因为DoG算子会产生较强的边缘响应),以增强匹配稳定性、提高抗噪声能力。空间尺度函数D(x,y,)DT、,D(x, y, ) D Xo, y0, XX 02xT 2D)泰勒展开式如下:DTD(x, y,
7、 ) D x,y, xx2D-x x对上式求导,并令其为0,得到精确的位置父权2D 1 Dx2 x在已经检测到的特征点中,要去掉低对比度的特征点和不稳定的边缘响应点。去除低对比度的点:把公式(4)代入公式(3),只取前两项可得:D(幻 Dx, y,1 DT2 x若 D 2 0.03,该特征点就保留下来,否则丢弃。边缘响应的去除一个定义不好的高斯差分算子的极值在横跨边缘的地方有较大的主曲率,而在垂直边缘的方向有较小的主曲率。主曲率通过一个2x2的Hessian巨阵H求出:DxxDxyDxyDyy导数由采样点相邻差估计得到。D的主曲率和H的特征值成正比,令为最大特征值,为最小的特征值,Tr(H)D
8、xx+=a+民Det(H)DXIDvy(Dry)2-ad-2=8+31=(r:+尸产=(+1产Det(H)adrtPr(r+1)7r的值在两个特征值相等的时候最小,随着r的增大而增大,因此,为了检测主曲率是否在某域值r下,只需检测R(H)2(+IDet(H)<r在Lowe的文章中,取r=10。5)关键点方向分配利用关键点邻域像素的梯度方向分布特性为每个关键点指定方向参数,使算子具备旋转不变性。冽(苞)=(£(工+1M一应+任(工1+1)71)产My)=atan2(£(x,y+1)-L(x,y+ty)-L(x式(5)为(x,y)处梯度的模值和方向公式。其中L所用的尺度为
9、每个关键点各自所在的尺度。在实际计算时,我们在以关键点为中心的邻域窗口内采样,并用直方图统计邻域像素的梯度方向。梯度直方图的范围是0360度,其中每10度一个柱,总共36个柱。直方图的峰值则代表了该关键点处邻域梯度的主方向,即作为该关键点的方向。图4是采用7个柱时使用梯度直方图为关键点确定主方向的示例。(窗口尺寸采用Lowe隹荐的1.5(TX1.5(T)图4由梯度方向直方图确定主梯度方向在梯度方向直方图中,当存在另一个相当于主峰值80喊长量的峰值时,则将这个方向认为是该关键点的辅方向。一个关键点可能会被指定具有多个方向(一个主方向,一个以上辅方向),这可以增强匹配的鲁棒性53。至此,图像的关键
10、点已检测完毕,每个关键点有三个信息:位置、所处尺度、方向。由此可以确定一个SIFT特征区域(在实验章节用椭圆或箭头表示)。6)特征点描述子生成首先将坐标轴旋转为关键点的方向,以确保旋转不变性。颖域嗦宣方司关锯点特征向最图5由关键点邻域梯度信息生成特征向量接下来以关键点为中心取8X8的窗口。图5-4左部分的中央黑点为当前关键点的位置,每个小格代表关键点邻域所在尺度空间(和关键点是否为一个尺度空间)的一个像素,利用公式(5)求得每个像素i,j的梯度幅值mi,j与梯度方向i,j,箭头方向代表该像素的梯度方向,箭头长度代表梯度模值,然后用高斯窗口对其进仃加权运算,每个像素对应一个向重,长度为G,i,j
11、mi,j,G,i,j为该像素点的高斯权值,方向为i图中蓝色的圈代表高斯加权的范围(越靠近关键点的像素梯度方向信息贡献越大)。高斯参数J取3倍特征点所在的尺度。然后在每4X4的小块上计算8个方向的梯度方向直方图,绘制每个梯度方向的累加值,即可形成一个种子点,如图5右部分所示。此图中一个关键点由2X2共4个种子点组成,每个种子点有8个方向向量信息。这种邻域方向性信息联合的思想增强了算法抗噪声的能力,同时对于含有定位误差的特征匹配也提供了较好的容错性。实际计算过程中,为了增强匹配的稳健性,对每个关键点使用4X4共16个种子点来描述,这样对于一个关键点就可以产生128个数据,即最终形成128维的SIF
12、T特征向量。此时SIFT特征向量已经去除了尺度变化、旋转等几何变形因素的影响,再继续将特征向量的长度归一化,则可以进一步去除光照变化的影响。当两幅图像的SIFT特征向量生成后,下一步我们采用关键点特征向量的欧式距离来作为两幅图像中关键点的相似性判定度量。取图像1中的某个关键点,并找出其与图像2中欧式距离最近的前两个关键点,在这两个关键点中,如果最近的距离除以次近的距离少于某个比例阈值,则接受这一对匹配点。降低这个比例阈值,SIFT匹配点数目会减少,但更加稳定。为了排除因为图像遮挡和背景混乱而产生的无匹配关系的关键点,用比较最近邻距离与次近邻距离的方法,距离比率ratio小于某个阈值的认为是正确
13、匹配。因为对于错误匹配,由于特征空间的高维性,相似的距离可能有大量其他的错误匹配,从而它的ratio值比较高。推荐ratio的阈值为0.8。5仿真结果分析将文件加入matlab目录后,在主程序中有两种操作:op1:寻找图像中的Sift特征:image,discrips,locs=sift('scene.pgm');Findingkeypoints.1021keypointsfound.>>showkeys(image,locs);DrawingSIFTkeypoints.501001502002503003505010015020025030035040045050
14、0op2:对两幅图中的SIFT特征进行匹配:match('scene.pgm','book.pgm');Findingkeypoints.1021keypointsfound.Findingkeypoints.882keypointsfound.Found98matches.50 b1001502002506代码1) appendimages.m%im=appendimages(image1,image2)%Returnanewimagethatappendsthetwoimagesside-by-side.functionim=appendimages(ima
15、ge1,image2)%Selecttheimagewiththefewestrowsandf川inenoughemptyrows%tomakeitthesameheightastheotherimage.rows1=size(image1,1);rows2=size(image2,1);if(rows1<rows2)image1(rows2,1)=0;elseimage2(rows1,1)=0;end%Nowappendbothimagesside-by-side.im=image1image2;2) match.m%num=match(image1,image2)%Thisfunct
16、ionreadstwoimages,findstheirSIFTfeatures,andmatch is acceptedthe distance to the%displayslinesconnectingthematchedkeypoints.A%onlyifitsdistanceislessthandistRatiotimes%secondclosestmatch.%Itreturnsthenumberofmatchesdisplayed.%Example:match('scene.pgm','book.pgm');functionnum=match(im
17、age1,image2)%FindSIFTkeypointsforeachimageim1,des1,loc1=sift(image1);im2,des2,loc2=sift(image2);%ForefficiencyinMatlab,itischeapertocomputedotproductsbetween%unitvectorsratherthanEuclideandistances.Notethattheratioof%angles(acosofdotproductsofunitvectors)isacloseapproximation%totheratioofEuclideandi
18、stancesforsmallangles.%distRatio:Onlykeepmatchesinwhichtheratioofvectoranglesfromthe%nearesttosecondnearestneighborislessthandistRatio.distRatio=0.6;image, select its match to second image.% Precompute matrix transpose% Computes vector of dot products% Take inverse cosine and sort%Foreachdescriptori
19、nthefirstdes2t=des2'fori=1:size(des1,1)dotprods=des1(i,:)*des2t;vals,indx=sort(acos(dotprods);results%CheckifnearestneighborhasanglelessthandistRatiotimes2nd.if(vals(1)<distRatio*vals(2)match(i)=indx(1);elsematch(i)=0;endend%Createanewimageshowingthetwoimagessidebyside.im3=appendimages(im1,im
20、2);%Showafigurewithlinesjoiningtheacceptedmatches.figure('Position',100100size(im3,2)size(im3,1);colormap('gray');imagesc(im3);holdon;cols1=size(im1,2);fori=1:size(des1,1)if(match(i)>0)line(loc1(i,2)loc2(match(i),2)+cols1,.loc1(i,1)loc2(match(i),1),'Color','c');end
21、endholdoff;num=sum(match>0);fprintf('Found%dmatches.n',num);3) showkeys.m%showkeys(image,locs)%ThisfunctiondisplaysanimagewithSIFTkeypointsoverlayed.%Inputparameters:%image:thefilenamefortheimage(grayscale)%locs:matrixinwhicheachrowgivesakeypointlocation(row,%column,scale,orientation)func
22、tionshowkeys(image,locs)disp('DrawingSIFTkeypoints.');%Drawimagewithkeypointsfigure('Position',5050size(image,2)size(image,1);colormap('gray');imagesc(image);holdon;imsize=size(image);fori=1:size(locs,1)%Drawanarrow,eachlinetransformedaccordingtokeypointparameters.TransformLi
23、ne(imsize,locs(i,:),0.0,0.0,1.0,0.0);TransformLine(imsize,locs(i,:),0.85,0.1,1.0,0.0);TransformLine(imsize,locs(i,:),0.85,-0.1,1.0,0.0);endholdoff;%Subroutine:TransformLine%Drawthegivenlineintheimage,butfirsttranslate,rotate,and%scaleaccordingtothekeypointparameters.%Parameters:%Arrays:%imsize=rowsc
24、olumnsofimage%keypoint=subpixel_rowsubpixel_columnscaleorientation%Scalars:%x1,y1;beginingofvector%x2,y2;endingofvectorfunctionTransformLine(imsize,keypoint,x1,y1,x2,y2)%Thescalingoftheunitlengtharrowissettoapproximatelytheradius%oftheregionusedtocomputethekeypointdescriptor.len=6*keypoint(3);%Rotat
25、ethekeypointsby'ori'=keypoint(4)s=sin(keypoint(4);c=cos(keypoint(4);%Applytransformr1=keypoint(1)-len*(c*y1+s*x1);c1=keypoint(2)+len*(-s*y1+c*x1);r2=keypoint(1)-len*(c*y2+s*x2);c2=keypoint(2)+len*(-s*y2+c*x2);line(c1c2,r1r2,'Color','c');4) sift.m%image,descriptors,locs=sift(i
26、mageFile)%ThisfunctionreadsanimageandreturnsitsSIFTkeypoints.%Inputparameters:%imageFile:thefilenamefortheimage.%Returned:%image:theimagearrayindoubleformat%descriptors:aK-by-128matrix,whereeachrowgivesaninvariant%descriptorforoneoftheKkeypoints.Thedescriptorisavector%of128valuesnormalizedtounitleng
27、th.%locs:K-by-4matrix,inwhicheachrowhasthe4valuesfora%keypointlocation(row,column,scale,orientation).The%orientationisintherange-PI,PIradians.%Credits:ThanksforinitialversionofthisprogramtoD.Alvaroand%J.J.Guerrero,UniversidaddeZaragoza(modifiedbyD.Lowe)functionimage,descriptors,locs=sift(imageFile)%
28、Loadimagefollowingimage=imread(imageFile);%IfyouhavetheImageProcessingToolbox,youcanuncommentthe%linestoallowinputofcolorimages,whichwillbeconvertedtograyscale.%ifisrgb(image)%image=rgb2gray(image);%endrows,cols=size(image);%ConvertintoPGMimagefile,readableby"keypoints"executablef=fopen('tmp.pgm','w');iff=-1error('Couldnotcreatefiletmp.pgm.');endfprintf(f,'P5n%dn%dn255n',cols,rows);fwrite(f,image','uint8');fclose(f);%Callkeypoint
温馨提示
- 1. 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
- 2. 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
- 3. 本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
- 4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
- 5. 人人文库网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
- 6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
- 7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
最新文档
- 湖北省2024年初中学业水平考试模拟训练语文试卷含答案
- 2020-2025年中国安全防护服行业市场运营现状及投资战略咨询报告
- 年产吨无氧光亮铜杆项目可行性研究报告
- 2024-2027年中国UWB定位市场竞争态势及行业投资潜力预测报告
- 2025年全球核燃料行业市场调研与发展前景预测分析报告
- 智能工业车辆项目可行性研究报告申请立项
- 畜禽交易市场体系建设项目可行性研究报告
- 2025年中国硝基咪唑类药物行业发展前景及投资战略咨询报告
- 2023-2029年中国替硝唑阴道泡腾片行业市场全景评估及投资前景展望报告
- 2025内墙粉刷合同格式
- 空气动力学仿真技术:湍流模型:k-ε湍流模型原理与应用
- 高中期末考试考风考纪及诚信教育
- 2025届广东省深圳市深圳外国语九年级物理第一学期期末经典试题含解析
- 机械工程技术训练智慧树知到期末考试答案章节答案2024年北京航空航天大学
- 人工智能导论智慧树知到期末考试答案章节答案2024年哈尔滨工程大学
- 医生与患者关系中的信任与治疗
- 心衰患者的容量管理中国专家共识-共识解读
- 山东省济南市2023-2024学年高一上学期1月期末考试数学试题(解析版)
- 文字学概要完整版本
- ce自我声明模板
- 钢闸门监理评估报告
评论
0/150
提交评论