



版权说明:本文档由用户提供并上传,收益归属内容提供方,若内容存在侵权,请进行举报或认领
文档简介
1、具有冗余自由度的机械手臂的构型优化整理 贾腾 赵宪良 崔金超 安少杰 李朝阳 赵士欣摘 要: 利用 Pro /E软件建立了机械手臂的三维模型, 并通过插件 MECHAN IS M /Pro对模型进行刚体定义, 把模型导入ADAMS进行后续的约束和驱动添加, 从而获得机械手臂的虚拟样机。然后对机械手臂的虚拟样机的工作域进行求解分析,并通过运动仿真模拟了机械手臂关节在实际作业过程中的驱动情况, 得出其运动曲线, 并分析和验证了所建立的机械手臂的运动方程的正确性。关键词:Pro/E; 运动学分析;机械手;ADAMS;优化;0 引言冗余自由度机械臂具有灵活性高、避障能
2、力强、以及抗故障风险等优点,可以在保证末端操作器位姿不变的前提下实现避奇异、避障、避关节极限、关节力矩优化及抑制振动等运动学和动力学层面的优化。随着计算机技术和加工制造业的飞速发展, 机器人技术的发展速度越来越快, 其智能化程度越来越高, 已经应用并扩展到经济发展的诸多领域, 成为现代生产和高科技研究中的一个不可或缺的组成部分。目前, 随着机器人技术研究领域的不断发展, 机器人计算机仿真系统作为机器人设计和研究的灵活方便的工具, 发挥着重要的作用。机器人计算机仿真系统在机器人技术研究的许多方面都有应用。ADAMS软件具有十分强大的运动学和动力学分析功能, 但由于ADAMS的建模能力相对薄弱,
3、前处理模块中的几何建模功能不强, 无法完成复杂模型的建模, 因此降低了结构分析结果的可信度。整理利用基于特征的参数化设计软件 Pro/E建立五自由度的机械手臂结构并赋予与实际相应的各种属性, 然后利用M echanism /Pro模块将虚拟样机模型导入到 ADAMS环境下, 进行运动学仿真分析, 并根据 D-H 方法对其进行数学模型的建立, 进行正向运动学和逆向运动学分析, 利用仿真结果来验证所建立的机械手臂的运动方程。一 机械手臂的仿真建模1.1 机械手臂的三维模型建立机械手采用 Pro/E来进行建模, 其 Pro/E模型如图 1所示。该机械手臂参照人体手臂的结构, 采用开链连杆式的关节型结
4、构, 分为前臂、上臂、手腕和手爪等结构, 以及能够旋转的腰关节、肩关节、肘关节、腕关节和手爪关节。机械手臂拥有 5个自由度,但由于机械手臂可以安装在移动的车体上而增加额外的自由度, 故总体自由度为 6以上, 使手臂末端执行器能实现空间中的任何位姿。图1 机械手臂的三维模型12 机械手的驱动方式机械手的驱动方式很多, 常用液压、气动、机械传动、电机驱动等。本机械手模型采用电机 ( 舵机) 驱动, 舵机属于微型伺服马达 (Servo) , 含义为 “ 掌舵人操纵的机器” , 在航模及自动控制中, 舵机担当着重要的作用, 与普通电机不同的是, 舵机能够提供相当精确的位置控制以及比较大的扭矩输出。本机
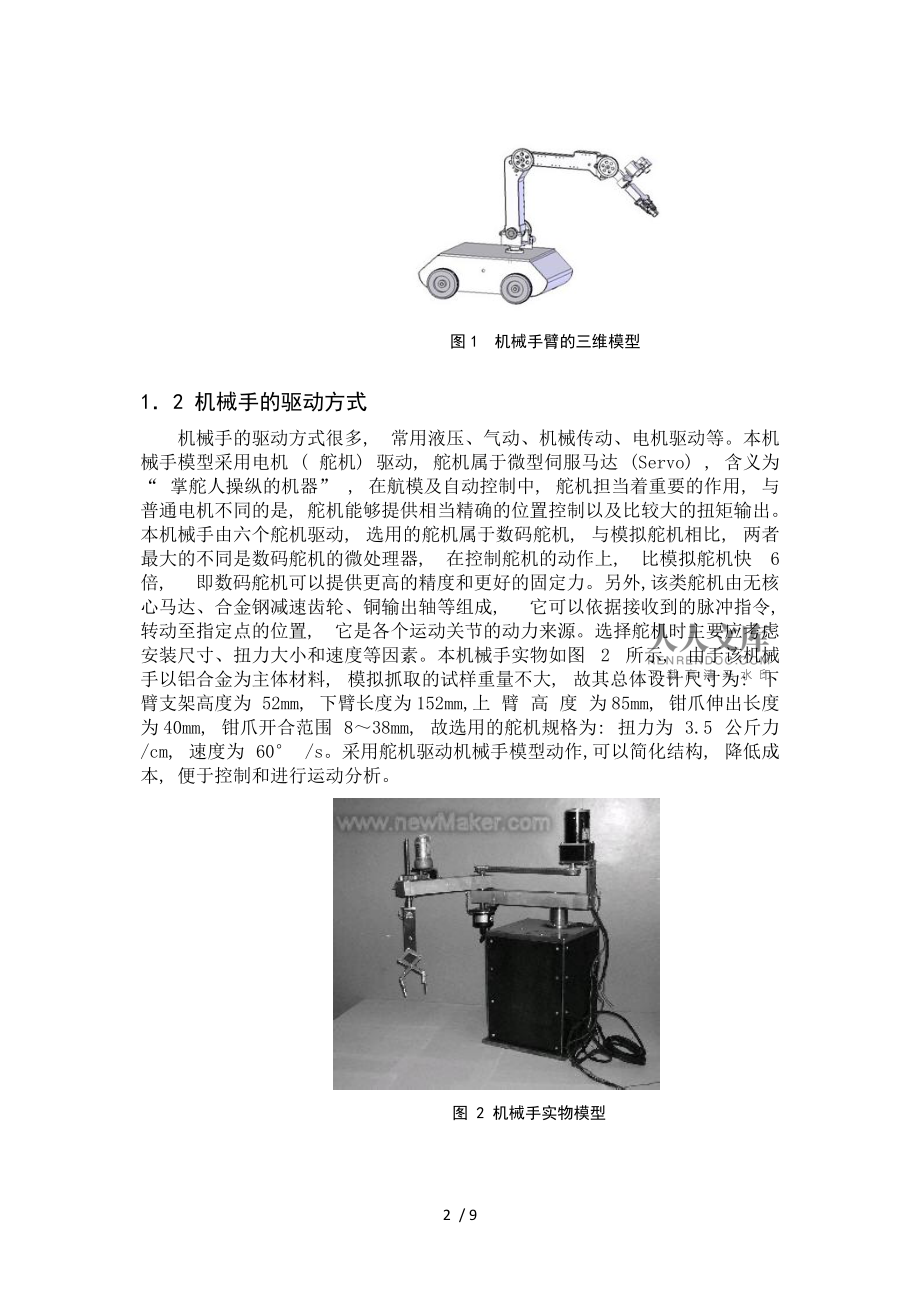
5、械手由六个舵机驱动, 选用的舵机属于数码舵机, 与模拟舵机相比, 两者最大的不同是数码舵机的微处理器, 在控制舵机的动作上, 比模拟舵机快 6 倍, 即数码舵机可以提供更高的精度和更好的固定力。另外,该类舵机由无核心马达、合金钢减速齿轮、铜输出轴等组成, 它可以依据接收到的脉冲指令, 转动至指定点的位置, 它是各个运动关节的动力来源。选择舵机时主要应考虑安装尺寸、扭力大小和速度等因素。本机械手实物如图 2 所示, 由于该机械手以铝合金为主体材料, 模拟抓取的试样重量不大, 故其总体设计尺寸为: 下臂支架高度为 52mm, 下臂长度为152mm,上 臂 高 度 为85mm, 钳爪伸出长度为40m
6、m, 钳爪开合范围 838mm, 故选用的舵机规格为: 扭力为 3.5 公斤力/cm, 速度为 60° /s。采用舵机驱动机械手模型动作,可以简化结构, 降低成本, 便于控制和进行运动分析。图 2 机械手实物模型13 机械手臂虚拟样机的建模在 Pro/E 中 利 用M echanism /Pro 对 零 件进行合 并和 刚体定义后, 就可以传递到AD-AMS环境中 进行约 束的定义。为了更好地对零件进行后续操作, 可以把零件改成相应的名字, 然后添加运动副约束、基本约束或运动约束, 施加相应的载荷。在添加约束的时候, 需要把基座和地(Ground) 用锁定约束进行连接, 这样模型才能
7、进行正确的仿真。二 连杆坐标系与运动学分析图 3 机械手臂的连杆坐标系统D-H法由 Denauuit和 Hartenbery于 1956年提出, 它严格定义了每个坐标系的坐标轴, 并对连杆和关节定义了 4个参数, 是对机器人连杆和关节建模的一种非常简单的方法, 可用于很多机器人的构型。利用 D-H方法对设计的五自由度的机械手臂建立各连杆的坐标系, 如图 3所示。由连杆坐标系统确定了连杆的 D-H 参数和各个关节的变量如表 1所示。表 1 机器人手臂的 D- H 参数连杆变量根据表 1所示的参数和 D-H 法, 可得机械手臂的运动方程为式中:其中 X、Y、Z为连杆坐标系 3个方向的坐标轴;PX、
8、PY、PZ为手腕端面坐标系原点在基坐标系中的位置; d2为连杆 2与连杆 1的距离;Hi为机械手臂第i关节的旋转角度;li为连杆 i的长度; 而 n、 o、a矢量则表示了手腕端面坐标系各坐标轴的方向余弦向量。在实际应用中, 通常还要求根据末端的位姿求出各个关节的角度, 即求机械手臂的运动学逆解。对于关节型机器人手 臂来说, 其灵巧 点一般具 有多解性。造成机器人手臂运动学逆解具有多解的原因是由于解反三角函数方程时产生的。对处于实际工作环境的机械手臂来说, 例如文中的机械手臂由于作业避障要求, 存在可能只有一组解与实际对应的情况,因此必须做出正确的判断, 选择合适的解。所有具有转动和移动关节的机
9、器人系统, 在一个单一的串联链中, 自由度小于或等于 6时是可解的,因此文中的五自由度机械手臂的逆运动学可以进行求解。由于运动方程 T5有很多角度的耦合, 对运动学方程进行求解时不能通过方程式联立求解, 而是用一系列变换矩阵的逆左乘, 使得方程右边不再包含这个角度, 然后找出右端为常数的元素, 并令这些元素与左端元素相等, 从而得到相应角度的解如下:由末端执行器位姿坐标轴 a (Z)轴与手腕的指向的几何关系有在逆运动学方程中, 末端执行器的位姿为已知量, 取其中两个元素相等, 即从而求得三 运动仿真结果与分析31 机械手臂的工作域仿真工作域是指机械手臂上的一个特定标记点能在空间的最大活动范围。
10、工作空间的形状和大小反映了机器人手臂工作能力的大小, 它不随环境的变化而变化, 故机器人手臂的标记点常选手腕的端部或手爪的端部。根据机械手臂的参数和基本设计指标, 对其虚拟样机进行运动仿真, 可以得出理论工作区域和其特殊的工作尺寸, 同时机械手臂上任意点的轨迹也可以得到。在进行仿真之前要先在机械手臂虚拟样机上添加驱动和测量。在肩关节的齿轮、肘关节、腕关节的转动副上分别添加电机驱动 (Rotation jointmotion), 运动方式选择转动, 然后在 Function ( tm i e) 项中输入运动函数, 分别控制各关节的伸展状态和摆动角度如下:在对机器人手臂进行运动仿真的时候, 需要把
11、手臂的自由度调整到 0。而在仿真过程中, 忽略了腰关节和手爪的自转运动对运动轨迹的影响, 但仍然需要对其转动副添加电机驱动 ( Rotation jointmotion), 选择转动的运动方式,Function ( tm i e) 项中输入 0, 使得关节在整个仿真过程中处于锁紧状态, 手臂样机的模型总自由度为 0。在机械手臂的运动过程中, 对手爪的 M arker点 (标记点 ) 进行轨迹描绘即可完成手爪运动轨迹的跟踪和测绘, 即可获得机械手臂在垂直平面内如图 4所示的理论工作域。图 4 机械手臂样机的工作轨迹图手爪上的标记点设置了 X 和 Y 方向位移的跟踪测量, 仿真完成后进入 ADAM
12、 S/Postprocessor , 把仿真中的测量值调出, 即可得到位移曲线图, 如图 5所示。图 5 机械手臂中手爪上标记点的X 和 Y方向的位移曲线图32 机械手臂的动态仿真在 ADAMS /V ie w 中通过运动学的仿真可以对前面建立的方程进行研究和分析。ADAMS /V iew可以进行机电一体化的系统仿真分析, 联合运动控制程序对机器人手臂进行贴近实际的理论仿真。在设计阶段先对各个关节赋予变化的驱动, 模拟实际的运动控制情况, 分析手臂的运动情况。对机械手臂的上臂摆动关节、上臂摆动关节和手腕摆动关节施加相应的驱动来模拟实际复杂的运动。而腰关节的回转运动和手爪的自转运动较少与其他关节
13、联合作业, 均把驱动函数设置为 0。在手爪上的标记点建立 X 和 Y方向的位移测量, 输出位移变化曲线; 相应地对参与运动仿真的关节变量 H2、 H3和 H4建立角度 ( Angle) 测量, 输出角度变化曲线。运动仿真后获得的曲线如图 6所示。图六图 6上的横坐标为仿真的时间 ( s), 左纵坐标表示角度, 右坐标表示位移。Angle_Second、Angle_Three 、Angle_Four分别表示的 H2、 H3和 H4角度变量值; X 和 Y表示标记点相对基座系的 X 坐标值和 Y坐标值。图 7把仿真测量的角度变量曲线和位移曲线合并在一起, 容易对角度与位移的关系进行研究。在图 7中
14、, 选择仿真过程中的任意时刻, 对各关节主变量进行取值, 即可代入上面的运动方程 ( 1) 中计算出标记点的位移。将仿真结果与计算所得手爪标记点的位移进行比较即可验证上面所建立的运动方程;同样, 通过手爪标记点的位移取值, 即可通过式 ( 2) )( 6)计算出各关节变量值。将仿真结果与计算所得各关节变量值进行比较即可验证所建立的运动方程。此外, 通过 ADAMS /V iew 的仿真, 能实现对机械手臂的控制系统进行编程指导, 而且可以对运动控制系统的正确性和误差进行验证和调试, 降低控制系统的设计难度和缩短开发周期。四 结束语利用 Pro/E软件强大的三维建模能力对机械手臂进行了模型的建立, 并通过插件 M echan ism /Pro对模型进行刚体定义, 把模型导入 ADAM S进行后续的约束和驱动添加, 从而获得机械手臂的虚拟样机。同时还建立了机械手臂的连杆坐标系和运动方程, 并对虚拟样机进行工作域的仿真, 对关节进行模拟实际作业情况的驱动, 观察其运动曲线, 对理论运动方程进行校验, 为机械手臂运动控制的正确性和误差的验证与调试提供了依据。参考文献:<1> 矢野敏之, 李剑波, 张玉梅. 瑞萨 M16C/62P单片机原理和应用 . 北京: 清华大学出版社, 2006 .4.<2> 侯维岩, 费敏锐. PROFI BUS协议分析和系统应
温馨提示
- 1. 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
- 2. 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
- 3. 本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
- 4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
- 5. 人人文库网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
- 6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
- 7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
最新文档
- 烟草制品转运设备操作工岗中知识理论考核试卷含答案
- 砖瓦生产工岗中基础操作考核试卷含答案
- 生活垃圾清运工工作技能知识考核试卷含答案
- 高岭土加工工班组建设水平考核试卷含答案
- 课程考试题型及答案
- 习作四:我和-过一天
- 高海拔之巅:青藏高原与南极冰川溶解性有机质的特征、差异及环境启示
- 高比能锂离子电池热失控:危害剖析、精准建模与仿真策略研究
- 高校贷款风险管控:基于多案例的成因剖析与策略构建
- 高校竞技体育与校园文化的共生效应与协同发展研究
- 2026年吉林省国资委监管企业2026年度第一次集中招聘(613人)考试备考题库及答案详解
- 山东省淄博市2025-2026学年高二下学期7月期末化学试题含答案
- 2026年北京市朝阳区七年级数学下册期末考试试卷及答案
- 2026年天津市中考英语试卷(含答案)
- 高校创新创业竞赛项目辅导方案
- 特殊医学用途配方食品 (FSMP) 临床管理专家共识(2026 版)
- 《养老机构重大事故隐患判定标准》解读与分析
- 土石坝安全度汛
- TSG 08-2026 特种设备使用管理规则
- T-CEPPEA 5059-2024 电站储热系统设计技术规范1
- 防台风物资管理台账模板
评论
0/150
提交评论