



版权说明:本文档由用户提供并上传,收益归属内容提供方,若内容存在侵权,请进行举报或认领
文档简介
1、精选优质文档-倾情为你奉上实 验 报 告课程 线性系统理论基础 实验日期 2016年 6月 6 日专业班级 姓名 学号 同组人 实验名称全维状态观测器的设计 评分 批阅教师签字 一、实验目的1. 学习用状态观测器获取系统状态估计值的方法,了解全维状态观测器的极点对状态的估计误差的影响;2. 掌握全维状态观测器的设计方法;3. 掌握带有状态观测器的状态反馈系统设计方法。二、实验内容开环系统,其中 a) 用状态反馈配置系统的闭环极点:;b) 设计全维状态观测器,观测器的极点为:;c) 研究观测器极点位置对估计状态逼近被估计值的影响;d) 求系统的传递函数(带观测器及不带观测器时);绘制系统的输出阶
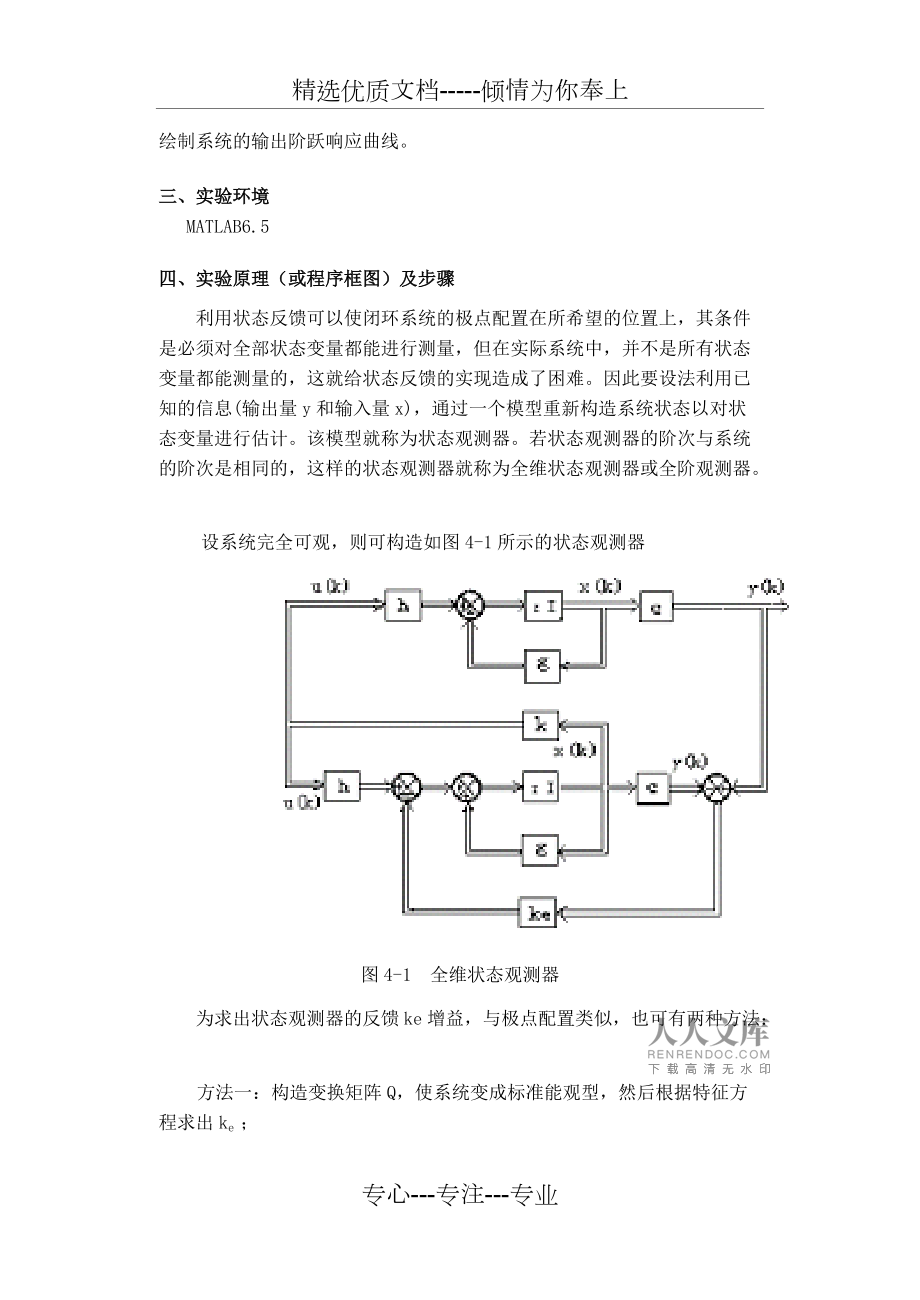
2、跃响应曲线。三、实验环境 MATLAB6.5四、实验原理(或程序框图)及步骤利用状态反馈可以使闭环系统的极点配置在所希望的位置上,其条件是必须对全部状态变量都能进行测量,但在实际系统中,并不是所有状态变量都能测量的,这就给状态反馈的实现造成了困难。因此要设法利用已知的信息(输出量y和输入量x),通过一个模型重新构造系统状态以对状态变量进行估计。该模型就称为状态观测器。若状态观测器的阶次与系统的阶次是相同的,这样的状态观测器就称为全维状态观测器或全阶观测器。设系统完全可观,则可构造如图4-1所示的状态观测器图4-1 全维状态观测器为求出状态观测器的反馈ke增益,与极点配置类似,也可有两种方法:方
3、法一:构造变换矩阵Q,使系统变成标准能观型,然后根据特征方程求出ke ;方法二:是可采用Ackermann公式: ,其中为可观性矩阵。 利用对偶原理,可使设计问题大为简化。首先构造对偶系统然后可由变换法或Ackermann公式求出极点配置的反馈k增益,这也可由MATLAB的place和acker函数得到;最后求出状态观测器的反馈增益。五、程序源代码、实验数据、结果分析(a)源程序: A=0 1 0;0 0 1;-6 -11 6;B=0;0;1;C=1 0 0;D=0;P1=-2+2*sqrt(3)*i;-2-2*sqrt(3)*i;-5;K1=place(A,B,P1)sysnew=ss(A-
4、B*K1,B,C,D)运行结果:K1 = 74.0000 25.0000 15.0000a = x1 x2 x3 x1 0 1 0 x2 0 0 1 x3 -80 -36 -9b = u1 x1 0 x2 0 x3 1c = x1 x2 x3 y1 1 0 d = u1 y1 0(b)源程序: A=0 1 0;0 0 1;-6 -11 6;B=0;0;1;C=1 0 0;D=0;P2=-5+2*sqrt(3)*i;-5-2*sqrt(3)*i;-10;K2=acker(A',C',P2);L=K2'Anew=A-L*C 运行结果:L = 26 282 1770Anew
5、= -26 1 0 -282 0 1 -1776 -11 6(c)研究观测器极点位置对估计状态逼近被估计值的影响: 观测器极点距离虚轴越近,估计状态逼近被估计值得速度越快。(d)不带观测器: 源程序: A=0 1 0;0 0 1;-6 -11 6;B=0;0;1;C=1 0 0;D=0;P1=-2+2*sqrt(3)*i;-2-2*sqrt(3)*i;-5;K1=place(A,B,P1)sysnew=ss(A-B*K1,B,C,D);num,den=ss2tf(A-B*K1,B,C,D);Gb=tf(num,den)step(Gb)grid on;title('不带观测器的系统的阶跃
6、响应曲线'); 运行结果: K1 = 74.0000 25.0000 15.0000Transfer function:7.105e-015 s2 + 1.208e-013 s + 1- s3 + 9 s2 + 36 s + 80 带观测器: 源程序: A=0 1 0;0 0 1;-6 -11 6;B=0;0;1;C=1 0 0;D=0;P1=-2+2*sqrt(3)*i;-2-2*sqrt(3)*i;-5;K1=place(A,B,P1);sysnew=ss(A-B*K1,B,C,D);P2=-5+2*sqrt(3)*i;-5-2*sqrt(3)*i;-10;K2=acker(A&#
7、39;,C',P2);L=K2'An=A -B*K1;L*C A-B*K1-L*CBn=B;BCn=C 0 0 0Dn=0;num,den=ss2tf(An,Bn,Cn,Dn);Go=tf(num,den)step(Go)grid on;title('带观测器的系统的阶跃响应曲线'); 运行结果: An = 1.0e+003 * 0 0.0010 0 0 0 0 0 0 0.0010 0 0 0 -0.0060 -0.0110 0.0060 -0.0740 -0.0250 -0.0150 0.0260 0 0 -0.0260 0.0010 0 0.2820 0 0 -0.2820 0 0.0010 1.7700 0 0 -1.8500 -0.0360 -0.0090Bn = 0 0 1 0 0 1Cn = 1 0 0 0 0 0Transfer function: -1.137e-013 s4 + s3 + 20 s2 + 137 s + 370-s6 + 29 s5 + 353 s4 + 2403
温馨提示
- 1. 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
- 2. 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
- 3. 本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
- 4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
- 5. 人人文库网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
- 6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
- 7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
最新文档
- 幼儿园师幼互动的几种形式
- 加盟按摩店合同范本
- 江苏达芯半导体有限公司介绍企业发展分析报告模板
- oa办公合同范本
- 共同投资租赁公司合同范例
- 2025年度城市综合体运营维护协议合同
- 依法催收欠款合同范本
- 买卖与服务合同范本
- 公司合伙人分配合同范本
- 全新服务器购买合同范例
- (2024年)电工安全培训(新编)课件
- mil-std-1916抽样标准(中文版)
- 城乡环卫一体化内部管理制度
- 广汇煤炭清洁炼化有限责任公司1000万吨年煤炭分级提质综合利用项目变更环境影响报告书
- 小学数学六年级解方程练习300题及答案
- 大数据在化工行业中的应用与创新
- 光伏十林业可行性报告
- 小学综合实践《我做环保宣传员 保护环境人人有责》
- 钢煤斗内衬不锈钢板施工工法
- 出国劳务派遣合同(专业版)电子版正规范本(通用版)
- 公路工程安全风险辨识与防控手册
评论
0/150
提交评论