



版权说明:本文档由用户提供并上传,收益归属内容提供方,若内容存在侵权,请进行举报或认领
文档简介
1、 在空间:一个自在质点位置需求3个独立参数,即自在质点在空间有3个自在度。 在平面:需求2个独立参数,即质点有2个自在度。遭到运动约束:质点自在度数将减少。完好约束:约束方程中不含速度项;稳定定常约束:约束方程中不显含时间t假设具有n个质点的质点系,有s个完好约束方程:snN3 3-1 3-1 自在度和广义坐标自在度和广义坐标那么:n个质点的质点系总自在度数为:描画质点系在空间位置的独立参数,称广义坐标;完好系统,广义坐标数目等于自在度数目。sxyMl由无重刚杆与小球构成平面摆,做定轴转动,摆长为l,是具有1个质点的平面质点系,自在度为2,有1个约束方程:222lyx用一个独立参数表示。假设质
2、点限定在半球面上运动,球半径为R,是具有1个质点的空间质点系,自在度数为3,有1个约束方程:xyzM)(222yxlz1, 1sn自在度数为:2133snN1, 1sn通常用2个独立参数和表示1122snN自在度数为:用q1、q2、qN表示质点系广义坐标:对完好约束质点系,各质点坐标可表示为广义坐标的函数。),(21Niiqqqrr进展变分计算:NkkkiNNiiiiqqrqqrqqrqqrr12211,s, krrrfnk21 0),(21设n个质点组成质点系受s个双面约束snN 3NkkkiNNiiiiqqxqqxqqxqqxx12211NkkkiiNkkkiiqqzzqqyy11kq为广
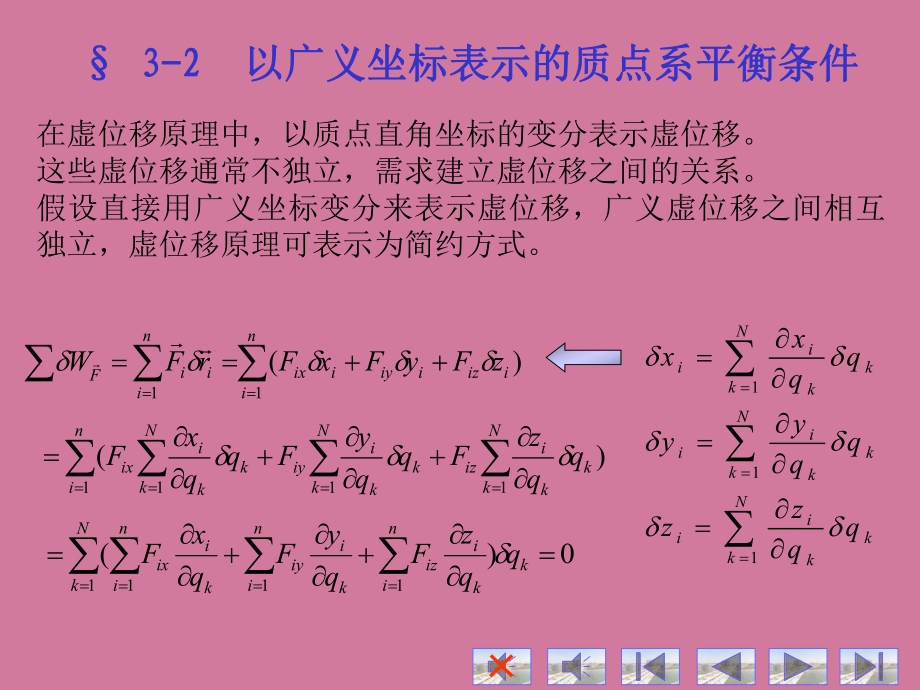
3、义虚位移。虚位移用广义坐标表示。),(),(),(212121NiiNiiNiiqqqzzqqqyyqqqxxkzjyixriiiikzjyixriiii同理:在虚位移原理中,以质点直角坐标的变分表示虚位移。 这些虚位移通常不独立,需求建立虚位移之间的关系。假设直接用广义坐标变分来表示虚位移,广义虚位移之间相互独立,虚位移原理可表示为简约方式。 3-2 3-2 以广义坐标表示的质点系平衡条件以广义坐标表示的质点系平衡条件niiiziiyiixniiiFzFyFxFrFW11)(NkkkiiNkkkiiNkkkiiqqzzqqyyqqxx111niNkkkiizNkkkiiyNkkkiixqqz
4、FqqyFqqxF1111)(0)(1111kNknikiiznikiiynikiixqqzFqyFqxFnikiiznikiiynikiixkqzFqyFqxFQ11101kNkkFqQW设:那么::kq它的量纲由对应的广义虚位移而定。为广义虚位移:kQ称为广义力k为线位移, Qk 量纲是力的量纲;k为角位移, Qk 量纲是力矩的量纲。由于广义坐标都是独立的,广义虚位移是恣意的。上式成立必需满足:021NQQQ质点系的平衡条件是一切的广义力都等于零0)(1111kNknikiiznikiiynikiixFqqzFqyFqxFW 质点系具有N个自在度,有N个广义力,那么有N个平衡方程是相互独立
5、的,可联立求解质点系的平衡问题 。 大多数工程机构只需一个自在度,这只需求列出一个广义力等于零的平衡问题。广义力求解方法有两种:广义力求解方法有两种:01kNkkFqQWnikiiznikiiynikiixkqzFqyFqxFQ111法法1. 1. 给质点系一个广义虚位移不等于零,而其它N-1个广义虚位移等于零。法法2.2.kkFqQWkFkqWQ质点系在权利场中,质点系上的自动力都为有权利,那么势能应为各质点坐标的函数,总势能为V表示为:),;,(111nnnzyxzyxVVixiVFx iyiVFy iziVFz )(iiziiyiixFzFyFxFW虚功为:虚位移原理表达为:0V在权利场
6、中,具有理想约束的质点系的平衡条件为质点系的势能在平衡位置处的一阶变分为零。)(iiiiiizzVyyVxxVV用广义坐标表示质点系位置。在权利场中,质点系势能可表示为广义坐标函数,总势能为V为:);,(21NqqqVViixxVFiiyyVFiizzVF广义力为:在权利场中,具有理想约束的质点系的平衡条件是势能对于每个坐标的偏导数分别等于零。)(kiizkiiykiixkqzFqyFqxFQkkqVQ)(kiikiikiiqzzVqyyVqxxVkqV平衡条件为:法法3:3:0kkqVQ)21(0NkqVQkk,314即:在权利场中具有理想约束的质点系的平衡条件是势能对于每个广义坐标的偏导数
7、分别等于零。在稳定平衡的平衡位置处,系统势能具有极小值在不平衡位置上,系统势能具有极大值对于随遇平衡,系统在某位置附近其势能是不变的,所以其附近任何能够位置都是平衡位置。稳定平衡稳定平衡不稳定平衡不稳定平衡对于一个自在度系统,系统具有一个广义坐标q因此系统势能可以表示为q的一元函数, 即)(qVV 当系统平衡时,根据式314,在平衡位置处有0ddqV 假设系统处于稳定平衡形状,那么在平衡位置处。系统势能具有极小值,即系统势能对广义坐标的二阶导数大于零。0dd22qV上式是一个自在度系统平衡的稳定性判据。对于多自在度系统平衡的稳定性判据可参考其他书籍。例1 复合摆机构, A、B点位置作用力F1
8、,F2, F. 。用广义坐标表示A、B点位置,求平衡时作用力F1 ,F2, F与1,2关系。xy11l1F2F2AB2lF解:方法 1:1取整个系统为研讨对象,A,B 2个质点具有4个自在度。两个约束方程:2122lyxAA2222)()(lyyxxABAB该质点系自在度数为:4-2=2,可以用2个独立参数。21,表示1111cossinlylxAA22112211coscossinsinllyllxBB2用广义坐标表示A,B1111cossinlylxAA22112211coscossinsinllyllxBB111111111cos,sinsinlxlylyBBAxy11l1F2F2AB2
9、lF222222222cos,sinsinlxlylyBBA)()(222212112111ABAABAxFyFyFQxFyFyFQ0cossinsin0cossinsin2222222111112111FllFlFFllFlF0cossin22222FllF0cossinsin11112111FllFlF22FFtg211FFFtgxy11l1F2F2AB2lF0cossinsin0cossinsin2222222111112111FllFlFFllFlF1111cossinlylxAA22112211coscossinsinllyllxBB111111sincoslylxAA2221112
10、22111sinsincoscosllyllxBB021BBAxFyFyF4虚位移原理:xy11l1F2F2AB2lF0)coscos()sinsin()sin(22211122211121111llFllFlF直接计算:0)cossin()cossinsin(22222211112111FllFFllFlF0cossin22222FllF0cossinsin11112111FllFlF22FFtg211FFFtgxy11l1F2F2AB2lFxy11l1F2F2AB2lF方法 2:111l11l 不变,给 虚位移211111sinlyA111111sincoslylxBB121111BBAx
11、FyFyFWQ111111121111)cos()sin()sin(lFlFlF111121cossin)(FllFFxy11l1F2F2AB2lF212l 不变,给 虚位移122222222sincoslylxBB221222BBAxFyFyFWQ0Ay22222222)cos()sin(lFlF22222cossinFllF0cossin)(1111211FllFFQ0cossin222222FllFQ22FFtg211FFFtg选题选题 设有一质点系由n个质点组成,质点系中第i个质点质量为mi,作用在该质点上的自动力的合力为Fi,约束反力的合力为FNi . 假设假想地加上该质点的惯性力F
12、Ii=-miai,由达朗贝尔原理,Fi 、Fni、 FIi构成平衡力系。整个质点系应组成平衡力系,质点系具有理想约束. 运用虚位移原理,得到:3-3 动力学普遍方程动力学普遍方程0)(iIiirFFkFjFiFFiziyixikzjyixriiiiIiiiiiiiFmxim y jmz k0)()()(1niiiiiziiiiyiiiixzzmFyymFxxmF 在理想约束的条件下,质点系的各个质点在任一瞬时所受的自动力和惯性力在虚位移上所作的虚功和等于零。称为动力学普遍方程。 0)(iIiirFF得到:例1 图示滑轮系统,动滑轮上悬挂质量为m1的重物,绳子绕过定滑轮后悬挂质量m2重物,滑轮和
13、绳子分量以及轮轴摩擦忽略不计,求m2重物下降的加速度。 1s2s2a1agm1gm21IF2IF解:1取整个系统为研讨对象,2受力分析系统的自动力为:m1g、 m2g 111amFI212amFI2给系统虚位移s1 和s2惯性力为: 设m2重物下降的加速度为a2,设m1重物下降的加速度为a1。0)()(11112222samgmsamgm代入加速度和虚位移关系得到:2121aa , 2121ssgmmmma121224243动力学普遍方程: 1s2s2a1agm1gm21IF2IF选题选题Co例3-5 如图二一样圆轮半径皆为R,质量皆为m,轮可绕O轴转动,二轮相连绳铅直时,轮中心C的加速度。
14、12gm1IM2IMIF解:1取系统为研讨对象2力分析: 作用的自动力mg3设轮的角加速度为1轮的角加速度为2轮惯性力偶:MI=J11轮I 惯性力偶:MI=J22惯性力:FI=maC21RRaC4)加虚位移: 轮: 轮I :C121IM2IMIFgm12ABCaAaBaI 轮定轴转动1RaA1RaaABII 轮平面运动取B为基点CBBCaaa5) 动力学普遍方程:2122210IIImg sMFsM2122221212111()21()()02mg RRmRm RRRRmR 0)(21)(21222122122112RmmRmgRRmmRmgR212RRsC121IM2IMIFgm12ABCa
15、AaBa由虚位移的恣意性: 0)(210)(212212222112RmmRmgRRmmRmgRRg5221gRa54)(21解得:选题选题C121IM2IMIFgm12ABCaAaBa 3-4 第一类拉格朗日方程第一类拉格朗日方程,s, krrrfnk21 0),(21设n个质点组成质点系受s个双面约束kzfjyfixfrfikikikik0)()(1111 niskiikkskniiikkrrfrrf设:01niiikrrf0)(1niiiiirrmF 由动力学普遍定理:nirfrmFskikkiii, 1 01 第一类拉格朗日方程例3-6 如下图的运动系统中,可沿光滑程度面挪动的重物M1
16、的质量为m1;可在铅直面内摆动的摆锤M2的质量为m2。两个物体用无重杆衔接,杆长为l。求此系统微幅摆动的周期。2M1MxyCO解:1取整个系统为研讨对象。选取坐标轴如下图,那么M1和M2的坐标各为x1、y1和x2 、y2。2运动分析: 系统遭到程度面和刚性杆的约束,有2个约束方程。 011 yf0)()(22212212lyyxxf2 , 1 01irfrmFskikkiii 1, 011212111yfyfxfxf011 yf0)()(22212212lyyxxf)(2),(2)(2),(22122211221222112yyyfyyyfxxxfxxxf2M1MxyCOgm1gm20)(0)
17、(00)(0)(02222111222222112212211111112211111yfyfymgmxfxfxmyfyfymgmxfxfxm 0)(20)(20)(20)(222121221222121211121211gmyyymxxxmgmyyymxxxm 0)(20)(20)(20)(222122221222121211121211gmyyymxxxmgmyyymxxxm 01y0)()(2221221lyyxx0)()()()(0)()(00)(22121212212121222112121122111yyyyyyxxxxxxgmymxmxxyyyxyymxm 约束方程微分,消去21
18、,2M1MxyCOgm1gm2 当系统各质点的虚位移不独立时,要找到虚位移之间的关系不方便。 动力学普遍方程用独立的广义坐标表示,可推导出第二类拉格朗日方程,这种方法便于求解非自在质点系的动力学问题。 设一质点系由n个质点组成,系统具有s个完好理想约束,具有N=3n-s个自在度。用q1、q2、qn表示系统的广义坐标。 设系统中第i个质点的质量为m1,矢径为 ri,矢径ri可表示为广义坐标和时间的函数: 3-5 第二类拉格朗日方程第二类拉格朗日方程),(21tqqqrrNii由质点系普遍方程: 011niiiiniiiramrF上式第一项又可以表示为: 11nNiikkikFrQqNkkkiiq
19、qrr1留意:这里不是研讨平衡问题,所以Qk不一定为零。 代入上式第二项得:111nnNiiiii ikiiikrmarmrqqnikkiiiNiqqrrm11)( niiiiniiiramrF110)(11NikkiiikNiqqrrmQ 1Niikkkrrqq011niiiiniiiramrF11nNiikkikFrQq对于完好约束的系统,其广义坐标是相互独立的。所以广义坐标的变分是恣意的,为使上式成立,必需有: ),3 , 2 , 1(01nkqrrmQNikiiik 这是具有N个方程的方程组,其中第二项与广义力对应,称为广义惯性力。 阐明广义力与广义惯性力相平衡,是达朗伯原理的广义坐标
20、表示。对广义力做如下变换Nikiiiqrrm1 )()(11NikiiiNikiiiqrdtdvmqrvdtdm0)(11NikkiiikNiqqrrmQ 1.证明: kikiqrqr),(21tqqqrrNii进一步简化,先证明两个等式kikiqrqrkikiqrqrdtd)(对时间求导数 trqqrrdtrdikNikiii1其中 ,kiqrtri是广义坐标和时间的函数,而不是广义速度的函数。kikiqrqrkq 再对 求偏导数:得证在完好约束下trqqrrdtrdikNikiii1对某qj求偏导数 1NiiikijjkrrrqqqqttqrqqqrjikNikji212将 jiqr对时间
21、求导数得: tqrqqqrqrdtdjikNikjiji212)(2.证明 :kikiqrqrdtd)(kikiqrqrdtd)(由此得证 )()(11NikiiiNikiiiqrdtdvmqrvdtdmjiiiavvr,kikiqrqrkikiqrqrdtd)(Nikiiiqrvm1NikiiiNikiiiqvvmqvvdtdm11)()()21()(11iNiiikNikiiivvmqqvvmdtdNiiikNiiikvmqvmqdtd1212)21()21(kkqTqTdtd其中 )21(12NiiivmT为质点系的动能kkkQqTqTdtd该方程组中方程式的数目等于质点系的自在度数,每
22、一个方程都是二阶常微分方程。 ),3 , 2 , 1(01NkqrrmQNikiiik kkNikiiiqTqTdtdqrvm1得 上式称为拉格朗日方程kkqVQ于是拉格朗日方程可写成kkkqVqTqTdtd上式就是保守系统的拉格朗日方程。记L=T-V,L称为拉格朗日函数或动势。假设作用在质点系上的自动力都是有权利,那么广义力Qk可写成拉格朗日方程用动势L =T-V表示 ), 2 , 1(0NkqLqLdtdkk 拉格朗日方程是处理具有完好约束的质点系动力学问题的普遍方程,是分析力学中重要的方程。 拉格朗日方程的表达式非常简约,运用时只需计算系统的动能和广义力; 对于保守系统,只需计算系统的动
23、能和势能。0kqV由于势能是坐标的函数ABCO0 x解:1取系统为研讨对象 此系统具有一个自在度。 以物块平衡位置为原点,取x为广义坐标如图。2以平衡位置为重力势能零点,系统在恣意位置x处的势能为例 6 如下图的系统中,A轮沿程度面纯滚动,轮心以程度弹簧联于墙上,质量为m1的物块C以细绳跨过定滑轮B联于A点。A、B二轮皆为均质圆轮,半径为R,质量为m2。弹簧刚度为k,质量不记。当弹簧较软,在细绳能一直坚持张紧的条件下,求此系统的运动微分方程。gxmxkV120)(210为平衡位置弹簧伸长量。2运动分析;B轮角速度为 Rx A轮质心速度为 x A轮角速度为 Rx 2222222221)(2121
24、21)(212121RxRmxmRxRmxmTABCO0 xx 物块速度为212)21(xmm此系统的动能为:gxmxkxmmVTL120212)(21)21(3代入拉格朗日方程 0)(LLdtd0)2(1012gmkxkxmm gmk104系统的运动微分方程为0)2(12kxxmm ABCO0 x得留意系统的动势为:选题选题例7 如下图的运动系统中,可沿光滑程度面挪动的重物M1的质量为m1;可在铅直面内摆动的摆锤M2的质量为m2。两个物体用无重杆衔接,杆长为l。求此系统微幅摆动的周期。2M1MxyCO解:1取整个系统为研讨对象。选取坐标轴如下图,那么M1和M2的坐标各为x1、y1和x2 、y
25、2。2运动分析: 系统遭到程度面和刚性杆的约束,所以具有两个自在度。 01ysin12lxxcos2ly 3拉格朗日方程列出系统的微分方程。 系统的动能为:2212112121vmvmT选x1和为广义坐标,那么有:2M1MxyCO11xv222222yxv 22121cos2lx lx)cos2(2)(211222121xllmxmmT其中:选M1在程度面上而M2在最低处为系统的零势能位置,那么系统的势能为: )cos1 (2glmV2M1MxyCO01xTcos)(21211lmxmmxT2221211sincos)()( lmlmxmmxTdtd)cos2(2)(211222121xllm
26、xmmT011xVQxsin12xlmTcos1222x lmlmT)cos1 (2glmV)cos2(2)(211222121xllmxmmT2M1MxyCO)sincos()(112 xxllmTdtdsin2glmVQ代入拉格朗日方程0sincos)(222121 lmlmxmmsin)sincos(2112glmxxllm 2M1MxyCOQTTdtdQxTxTdtdx)()(111)sincos()(112 xxllmTdtd2221211sincos)()( lmlmxmmxTdtd01xT011xVQxsin12xlmTsin2glmVQ1cos,sin假设M2摆动很小,那么可近
27、似地以为 且可忽略高阶小量,上式可改写为0sincos)(222121 lmlmxmmsin)sincos(2112glmxxllm 2M1MxyCO0)(2121 lmxmmgxl1 glx 10121lgmmm 解为 :)sin(tAn圆频率为 :lgmmmn1210)(2121 lmxmmgxl1 glmmm21122 摆动周期假设m1远大于m2,那么M1的位移x1将很小,M2的摆动周期将趋近于普通单摆的周期:glm2lim12M1MxyCO选题选题 3-6 3-6 拉格朗日方程的初积分拉格朗日方程的初积分对于保守系统,在一定条件下,可以直接给出初积分的普通方式。1.1.能量积分能量积分假设系统所遭到的约束均为定常约束,那么式34中不显含时间t, 从而kNikiiiqqrr1lkNlkklnilNllikNkkiiiniiiqqmqqrqqrmmT1111121)()(2121,327为关于 的二次齐次函数,iq 其中likiniiklqrqrmm1是广义坐标的函数, 称为广义质量,容易证明TqqTkNkk21328上式也称为关于齐次函数的欧拉定理,留意势能V不含 项,iq 从而TqqTqqLkNkkkNkk211将式326b对k求和329积分上式,有2T-L=T+V=常数33
温馨提示
- 1. 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
- 2. 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
- 3. 本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
- 4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
- 5. 人人文库网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
- 6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
- 7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
最新文档
- 云南省2025云南普洱市镇沅县融媒体中心急需紧缺人才招聘(1人)笔试历年参考题库典型考点附带答案详解
- 九江市2025上半年江西九江市事业单位“才汇九江”高层次人才招聘515人笔试历年参考题库典型考点附带答案详解
- 临海市2025年浙江临海市文化和广电旅游体育局及下属参公事业单位选调2人笔试历年参考题库典型考点附带答案详解
- 中山市2024广东中山市小榄镇高级专业人才招聘4人笔试历年参考题库典型考点附带答案详解
- 丘北县2025云南文山州丘北县事业单位紧缺岗位招聘(15人)笔试历年参考题库典型考点附带答案详解
- 三门县2025年浙江台州三门县委统战部招聘笔试历年参考题库典型考点附带答案详解
- 黔西南布依族苗族自治州2025贵州黔西南州发展和改革委员会(黔西南州粮食和物资储备局)十二届人博笔试历年参考题库典型考点附带答案详解
- 2026重庆市工程管理有限公司招聘17人笔试历年常考点试题专练附带答案详解
- 2026贵州铜仁万山翠丰农产品交易管理有限公司临聘人员招聘15人笔试历年常考点试题专练附带答案详解
- 2026秋季四川成都轨道交通集团有限公司“蓉漂人才荟”专场校园招聘15人笔试历年难易错考点试卷带答案解析
- 艾灸的风险及防范措施
- 2025至2030年中国高性能胶粘剂行业发展运行现状及投资战略规划报告
- 医院行风建设培训会课件
- 焊工教学 培训课件
- 煤炭仓储物流项目投资估算
- JG/T 336-2011混凝土结构修复用聚合物水泥砂浆
- DZ/T 0197-1997数字化地质图图层及属性文件格式
- 互联网医院的医疗服务质量与伦理监管
- GB/T 13511.2-2025配装眼镜第2部分:渐变焦定配眼镜
- 物流中心视频监控方案
- 起重机应急预案演练记录
评论
0/150
提交评论