

版权说明:本文档由用户提供并上传,收益归属内容提供方,若内容存在侵权,请进行举报或认领
文档简介
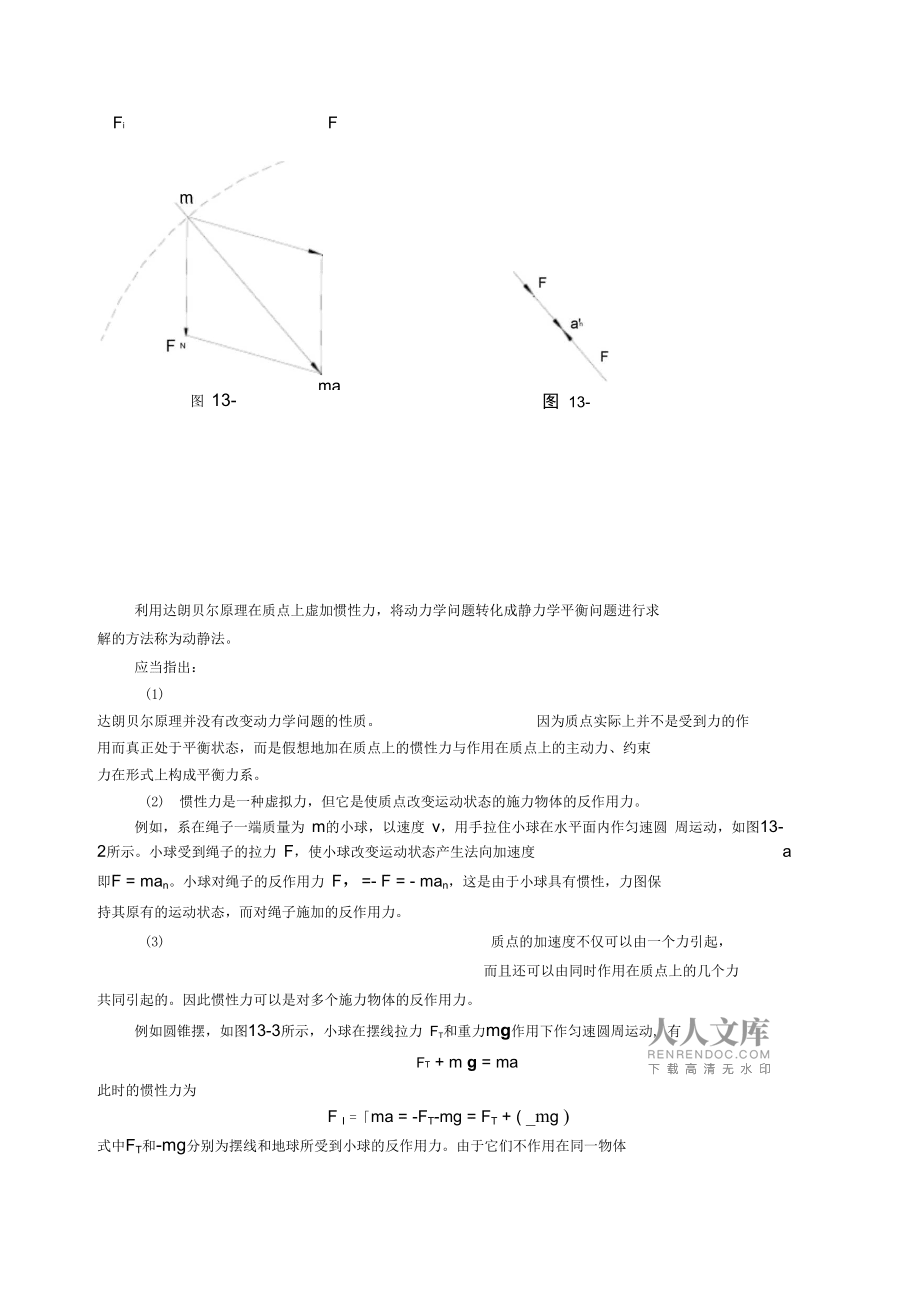
1、第四部分分析力学第13章达朗贝尔原理上面几章我们是以牛顿定律为基础研究质点和质点系的动力学问题,给出了求解质点 和质点系动力学问题的普遍定理。这一章我们要学习求解非自由质点系动力学问题的新方 法一一达朗贝尔原理,它是用静力学平衡的观点解决动力学问题,又称为动静法。它在解 决已知运动求约束力方面显得特别方便,因此在工程中得到广泛的应用。13.1 达朗贝尔原理惯性力质点的达朗贝尔原理设非自由质点的质量为m,加速度为a,作用在质点上的主动力为F,约束力为Fn ,如图13-1所示。根据牛顿第二定律,有m a = F + F N将上式移项写为F + Fn - ma = 0(13-1)引入记号FI = -
2、ma(13-2)式(13-1)成为F + Fn +Fi = 0(13-3)其中,F i具有力的量纲,称为质点的惯性力,它是一个虚拟力,它的大小等于质点的质量 与加速度的乘积,方向与质点的加速度方向相反。式(13-3)是一个汇交力系的平衡方程,它表示:作用在质点上的主动力、约束力和虚拟的惯性力在形式上构成平衡力系,称为质点的达朗贝尔原理。此原理是法国科学家达朗贝尔于1743年提出的。FiFmma图 13-2图 13-1利用达朗贝尔原理在质点上虚加惯性力,将动力学问题转化成静力学平衡问题进行求 解的方法称为动静法。应当指出:(1) 达朗贝尔原理并没有改变动力学问题的性质。因为质点实际上并不是受到力
3、的作 用而真正处于平衡状态,而是假想地加在质点上的惯性力与作用在质点上的主动力、约束 力在形式上构成平衡力系。(2) 惯性力是一种虚拟力,但它是使质点改变运动状态的施力物体的反作用力。例如,系在绳子一端质量为 m的小球,以速度 v,用手拉住小球在水平面内作匀速圆 周运动,如图13-2所示。小球受到绳子的拉力 F,使小球改变运动状态产生法向加速度a即F = man。小球对绳子的反作用力 F,=- F = - man,这是由于小球具有惯性,力图保 持其原有的运动状态,而对绳子施加的反作用力。(3) 质点的加速度不仅可以由一个力引起,而且还可以由同时作用在质点上的几个力 共同引起的。因此惯性力可以是
4、对多个施力物体的反作用力。例如圆锥摆,如图13-3所示,小球在摆线拉力 Ft和重力mg作用下作匀速圆周运动, 有Ft + m g = ma此时的惯性力为F I =ma = -FT-mg = FT + ( _mg )式中FT和-mg分别为摆线和地球所受到小球的反作用力。由于它们不作用在同一物体 上,当然没有合力,但它们构成了小球的惯性力系。F img图 13-311 Ft1a角。已知小球在水平面内作匀速圆周例题13-1有一圆锥摆,如图13-4所示,重为P =9.8 N的小球系于长为I =30cm的绳 上,绳的另一端系在固定点0,并与铅直线成60运动,试求小球的速度和绳子的拉力。i0 FtbFin
5、图 13-4F;,即解:以小球为研究对象,受由重力P、,绳子的拉力Ft以及在小球上虚拟的惯性力,如图13-4所示。由于小球在水平面内作匀速圆周运动,其惯性力只有法向惯性力P v2 g l sin方向与法向加速度相反。由质点的达朗贝尔原理得Ft + P+ F; = 0将上式向自然轴上投影,得下面的平衡方程n'、Fn =0Ft sin-Fin =0i =1n' Fb =0Ft cosP =0i 4解得FcOh"6NFgl sin 2= 2.1m/s质点系的达朗贝尔原理设质点系由n个质点组成,其中第i个质点的质量为 m加速度为aj ,作用该质点 的主动力Fj、约束力FNi、
6、惯性力=- miai,由质点的达朗贝尔原理第i个质点有Fi + FNi + Fn = 0 (i =1,2,,n)(13-4)式(13-4)表明:质点系中的每一个质点在主动 Fj、约束力FNi、惯性力F"作用下在形式 上处于平衡。若将作用在质点系上的力按外力和内力分,设第i个质点上的外力为、内力为F,,式(13-4 )为eiFi + Fi + Fn =0 (i =1,2/ ,n)( 13-5)式(13-5)表明:质点系中的每一个质点在外力F、内力F,、惯性力Fii,作用下在形式上处于平衡。对于整个质点系而言,外力Fie、内力Fii、惯性力(i =1,2/ ,n)在形式上构成空间平衡力系
7、,由静力学平衡理论知,空间任意力系平衡的必要与充分条件是力系 的主矢量和对任一点的主矩等于均为零。即nnnZ Fe + E fY Fh = 0普 i i" i 严n( 13-6)Z M o(F.e) + E M o(F )+Z M o(F|i )= 0ii =tIizinn由于内力是成对出现的,内力的主矢量F 0,内力的主矩a M o( F i 0。i iyi则式(13-6 )为Z FZ Fli =0i丄i丄I nn、M o(Fe)+ ' M o(F”)= 0即质点系的达朗贝尔原理 构成平衡力系。.VV:作用在质点系上的所有外力与虚加在质点上的惯性力在形式上式(13-7)在直
8、角坐标轴上的投影形式:(1)空间力系+e .eFV'vn+ezFXZi 4nFIxi0zi 1nFIyi=0zi 4FIzin013-8)XMzgn Ei-nzF/_kXMF/_kyM- 土F/_kzM 4-(2)平面力系nnZ F: +瓦 FIXi = 0i #i#nn(13-9)正 Fi; + j: F|yi = 0i #i住nn无 M o(Fie) + E M o(FH ) = 0i zii zi13.2 刚体惯性力系的简化在应用动静法解决非自由质点系的动力学问题时,需要在每个质点上虚加惯性力,当 质点较多,特别是刚体,非常不方便。因此需要对虚加惯性力系进行简化,以便求解。下 面
9、对刚体作平移、绕定轴转动和刚体平面运动时惯性力系的简化。平移刚体惯性力系的简化当刚体作平移时,由于同一瞬时刚体上各点的加速度相等,则各点的加速度都用质心 C的加速度表示,即ac = ai,如图13-5所示。将惯性力加在每个质点上,组成平行的惯 性力系,且均与质心 C的加速度方向相反,惯性力系向任一点0简化,得惯性力系主矢量F IR 八 F li 八m i a i 八(m i a c)i 4i =1i 4n=('-mi )ac = -Maci -iacairi 一y iFii图 13-5惯性力系的主矩nnM I。= 'XF ii = ' 匚 X( -m i a i )i
10、z!i 仝n= (jmiri)ac=-Mrcac( 13-11 )i 1式中rc为质心C到简化中心O点的矢径。若取质心C为简化中心rc = 0,则惯性力系的主 矩为Mio=0( 13-12)当简化中心不在质心 C处,其主矩M Io丸。结论:刚体作平移时,惯性力系简化为通过质心的一个合力,其大小等于刚体的质量和加速度的乘积,方向与加速度方向相反。定轴转动刚体的惯性力系简化这里只限于刚体具有质量对称平面且转轴垂直与此对称平面的特殊情形。当刚体作定轴转动时,先将刚体上的惯性力简化在质量对称平面上,构成平面力系,再将平面力系向转轴与对称平面的交点0简化。轴心0为简化中心,如图13-6所示,惯性力系的主
11、矢量为ddt(' mi v i)i 1F IR 八 F Ii 八-m i a i = i ii丄d=-(Mvc) = - M a cdt ')惯性力系的主矩为nnn2M I。= ' M °(Fii ) =-(' mi ar 眄)=-a m= J。a i =1i 二(13-14)其中,Jo为刚体对垂直于质量对称平面转轴的转动惯量。M I °acainft 、r Fini Fi iM ir'zF IR图 13-6图 13-7a.结论:具有质量对称平面且转轴垂直于此对称平面的定轴转动刚体的惯性力系,向转 轴简化为一个力和一个力偶。此力的大小
12、等于刚体的质量与质心加速度的乘积,方向与质 心加速度方向相反,作用线通过转轴;此力偶矩的大小等于刚体对转轴的转动惯量与角加 速度的乘积,转向与角加速度转向相反。当转轴通过质心时, 质心的加速度ac = 0 , Fir =0,则惯性力系简化为质心上的一个 力矩。即M Io = - J ° a(13-15)平面运动刚体惯性力系的简化设刚体具有质量对称平面,且刚体上的各点在与对称平面保持平行的平面内运动。此 时刚体上的惯性力简化在此对称平面内的平面力系。由平面运动的特点,取质心C为基点,如图13-7所示,质心的加速度为 ac,绕质心C转动的角速度为3,角加速度为a,惯性 力系的主矢量为Fi
13、R =- Ma。(13-16)惯性力系的主矩M ic = -Jc a( 13-17)其中,J c为过质心且垂直于质量对称平面的轴的转动惯量。结论:具有质量对称平面的刚体,在平行于此平面运动时,刚体的惯性力系简化为在 此平面内的一个力和一个力偶。此力大小等于刚体的质量与质心加速度的乘积,方向与质 心加速度方向相反,作用线通过质心;此力偶矩的大小等于刚体对通过质心且垂直于质量 对称平面的轴的转动惯量与角加速度的乘积,转向与角加速度转向相反。例题13-2均质圆柱体 A的质量为m,在外缘上绕有一细绳,绳的一端B固定不动,如图13-8a所示,圆柱体无初速度地自由下降,试求圆柱体质心的加速度和绳的拉力。(
14、a)(b)图 13-8解:对圆柱体A进行受力分析,作用其上的力有:圆柱体的重力mg,绳的拉力Ft ,作用在圆柱质心的虚拟惯性力Fi和M IA,即Fi =ma aM IA = J A=mR aa = mR其方向如图13-8b所示。列平衡方程为n二 M C =0i 4n二 F y=0i 1M IA -mgR 亠F R =0mg - Ft - Fi =0(3)式代入式 和式(3),并联立求解,得圆柱体的角加速度和绳的拉力为2g3R1 Ft mg圆柱体质心的加速度为2 aA =R a g3例题13-3如图13-9a所示,均质圆盘的质量为mi,由水平绳拉着沿水平面作纯滚动,绳的另一端跨过定滑轮 B并系一
15、重物 A,重物的质量为 m2。绳和定滑轮 B的质量不计,试求重物下降的加速度,圆盘质心的加速度以及作用在圆盘上绳的拉力。OA(a)F I2m2g(c)解:以圆盘为研究对象,作用在圆盘上的力有重力 摩擦力F ,虚拟惯性力其方向如图13-9b所示,列平衡方程为n' M D =0i 4Fm和M ic。虚拟惯性力F“和1Fn =m1acm 1a a21 2 ac 1M Ic = J2 am1rm1r2 r 2r为圆盘的半径。M Ic FMr - Ft=0mig,绳的拉力Ft,法向约束力Fn , M ic为aA21 m 1ra a4(1)再以重物A为研究对象,作用在重物A上的力有重力力FI2。虚
16、拟惯性力为m2g,绳的拉力Ft,虚拟惯性F I 2-m 2a A其方向如图13-9c所示。列平衡方程为n二 Fy =0i 1m 2g -Ft -Fi 2 = 0(2)式(1)和式(2)联立,并注意Ft,解得重物下降的加速度为8m 2aA3m, 8m2 g圆盘质心的加速度为4m 23m 1 8m 2 gm1m2作用在圆盘上绳的拉力为Ftg3mt +8m 2例题13-4均质直杆AB重为P,杆长为I , A为球铰链,B端自由,以匀角速度 3绕铅垂轴Az转动,如图13-10a所示。试求杆 AB与铅垂轴的夹角以及铰链A处的约束力。y ;oJ yGO(a)zdrFAtF AynaidFi2(b)(c)图
17、13-10解:首先计算惯性力如图13-10b所示,将杆分割成微段dr,且距A为r,则dr段上惯性力为P 2r sin - o drgldF In =dma=(pdr )r sin : o2(1)P其中,p =为杆的线密度。gl对式(1)积分,求合惯性力为/ -r sin0gI合惯性力的作用线位置,由合力矩定理nM A(F|n)Ma(F:)i吐F;in M o2 dr 二旦 I sin2g-co2(2)FIn x cos=/ r sin0gl:32 r cos dr其中,x为合惯性力到A的距离。 解得g 'H o2s"cos将式(2)代入得2.x l3由式(1)和式(3)知,此
18、惯性力为线性分布载荷,其合力为载荷图的面积,合力的作用 线通过载荷图的形心。其次求杆AB与铅垂轴的夹角以及铰链 对杆AB进行受力分析,A处的约束力为FAy、FAz13.3本章小结A处的约束力。如图13-10C所示,在杆所在的铅垂平面内,杆受重力P,铰链,虚拟惯性力。列平衡方程为n、' MA =0nFi-lCOS 1 : P-lsin 一: =0(4)i 132n、Fy=0F;FAy =0(5)i 1nFz=0Faz-P =0(6)i 12)代入式(4)、( 5)、(6 )得将惯性力式(Isin 1 322gFAy FFaz 二 P1. 质点的惯性力Fi=-ma其中,惯性力FI是一个虚拟
19、力。2. 质点的达朗贝尔原理:作用在质点上的主动力、约束力和虚拟的惯性力在形式上构成平衡力系。即F + F n + F i = 03. 质点系的达朗贝尔原理:作用在质点系上的所有外力与虚加在质点上的惯性力在形式上构成平衡力系。即平衡力系平衡的必要与充分条件是力系的主矢量和对任一点的主矩等于均为零。主矢量:nn、Fe + ' Fn =0 i 1 ii =ann主矢量:M o(Fe)+' M o(FH)= 0i =1i =14. 质点系达朗贝尔原理的投影形式:(1 )空间力系Z F:+E Fixi =0i =1i =1nn迟 Fi; +送 Fiyi =0i -1i二nnE Fz:
20、+送 Fizi=0Ji i I nnZ M x(Fe)+E M x(Fii )= 0i壬i二nnZ M y(Fe)+5; M y(Fn )= 0i壬i二nn送 M z(Fe) + Z M z(FH )= 0i 1i i(2 )平面力系nn送 F: +送 Fm =0i ±i =1nn正 Fiye + E F = 0i ±i 二nn送 M °(F:) +迟 M o(Fn )= 0i 1i ±5. 刚体惯性力系的简化(1) 平移刚体惯性力系的简化:Fir = -Mac其中,惯性力系简化为通过质心的一个合力。(2) 定轴转动刚体的惯性力系简化:F;=Mac MI
21、o = J。a当转轴通过质心时,定轴转动刚体的惯性力系简化为质心上的一个力矩。即M io = -Jo a(3) 平面运动刚体惯性力系的简化:FIR=- M a c M Ic = - J c a第14章虚位移原理在静力学中,我们利用力系的平衡条件研究了刚体在力的作用下的平衡问题,但对有 许多约束的刚体系而言,求解某些未知力需要取几次研究对象,建立足够多的平衡方程, 才能求出所要求的未知力。这样做是非常繁杂,同时平衡方程的确立只是对刚体而言是必 要和充分的条件;而对任意的非自由质点系而言,它只是必要条件不是充分条件。从本章开始我们学习用数学分析的方法来研究非自由质点系的力学问题,称为分析力 学。1
22、788年,法国科学家拉格朗日发表的分析力学一书,给出了解决非自由质点系的 新方法,即利用广义坐标描述非自由质点系的运动,使描述系统运动量大大减少,同时从 能量角度出发将质点系的动能、势能与功用广义坐标联系起来,给出了动力学普遍方程和 拉格朗日方程。虚位移原理是静力学的最一般原理,它给出了任意质点系平衡的必要和充分条件,减少了不必要的平衡方程,从系统主动力作功的角度出发研究质点系的平衡问题。14.1 约束自由度广义坐标约束质点或质点系的运动受到它周围物体的限制作用,这种限制作用称为 的数学方程称为 约束方程。按约束方程的形式对约束进行以下分类。约束,表示约束1.几何约束和运动约束限制质点或质点系
23、在空间的几何位置的条件称为 其约束方程为几何约束。例如图14-1所示的单摆,2 2 . 2x + y =1又如图14-2所示的曲柄连杆机构,其约束方程为2 2 2Xa +yA = r(Xa -Xb)2 + (y a-b)2 = i2y b = ol*3r 严 * M(x,y) Sry图 14-1A(xn,yn)图 14-2B(xn,yn)Vc图 14-3上述例子中的约束方程均表示几何约束。如果约束方程中含有坐标对时间的导数,或者说,约束限制质点或质点系运动的条件,称为运动约束。例如图14-3所示在平直轨道上作纯滚动的圆轮,轮心C的速度为Vc = 3r运动约束方程为Vc - wr= 0设xc和0
24、分别为轮心C点的坐标和圆轮的转角,则上式可改写为xC0r = 02. 定常约束与非定常约束约束方程中不显含时间的约束称为定常约束,上面各例中的约束均为定常约束。约束方程中显含时间的约束称为非定常约束,例如将单摆的绳穿在小环上,如图14-4所示,设初始摆长为|。,以不变的速度拉动摆绳,单摆的约束方程为2 2 2x +y = (I。vt)约束方程中有时间变量t,属于非定常约束。y图 14-43. 完整约束与非完整约束约束方程中含有坐标对时间的导数,而且方程不能积分成有限形式,称为非完整约束。反之,约束方程中不含有坐标对时间的导数;或约束方程中含有坐标对时间的导数,但能 积分成有限形式,称为 完整约
25、束。上述例子中在平直轨道上作纯滚动的圆轮,其运动约束 方程为完整约束。4. 双侧约束与单侧约束如果约束不仅限制物体沿某一方向的位移,同时也限制物体沿相反方向的位移,这种 约束称为双侧约束。例如,图14-1所示的单摆是用直杆制成的,摆杆不仅限制小球拉伸方 向的位移,而且也限制小球沿压缩方向的位移,此约束为双侧约束。若将摆杆换成绳索, 绳索不能限制小球沿压缩方向的位移,这样的约束为单侧约束。即约束仅限制物体沿某一 方向的位移,不能限制物体沿相反方向的位移,这种约束称为单侧约束。本章非自由质点系的约束只限于几何、定常的双侧约束,约束方程的一般形式为(14-1)fj(Xi,yi,Zi , ,Xn ,y
26、n ,Zn ) =0( j =1,2, ,s)式中n为质点系中质点的数目,s为约束方程的数目。自由度确定具有完整约束的质点系位置所需独立坐标的数目称为质点系的自由度数,简称自由度,用k表示。例如,在空间运动的质点,其独立坐标为(x,y,z),自由度为k=3 ;在平面运动的质点,其独立坐标为(x,y),自由度为k =2 ;作平面运动的刚体,其独立坐标为(Xa ,yA ,),自由度为k=3。一般情况,设由n个质点组成的质点系,受有s个几何约束,此完整系统的自由度数为空间运动的自由度数:k =3n -s;平面运动的自由度数:k =2n -s。广义坐标确定质点系位置的独立参量称质点系的广义坐标,常用q
27、 j (j =1,2,,s)表示。广义坐标的形式是多种的,可以是笛卡尔直角坐标x,y ,z、弧坐标s、转角。一般情况,设具有理想、双则约束的质点系,由n个质点组成,受有 s个几何约束,系统的自由度为k =3n -s,若以qq2,,qk表示质点系的广义坐标, 质点系第i个质点的 直角坐标形式的广义坐标为xi二Xg ,q2, q ,t)yi=yi(q1 ,q2, ,qk ,t)(i =1,2;,n)(14-2)乙= Zi(q1 ,q2 , ,qk ,t)矢量形式为=i(q1,q2, ,qk ,t)(i =1,2,n)(14-3)14.2 虚位移原理虚位移和虚功1.虚位移在某给定瞬时,质点或质点系为
28、约束所允许的无限小的位移称为质点或质点系的虚位移。虚位移可以是线位移,也可以是角位移。用变分符号Sr表示,以区别真实位移dr。例如图14-1所示的单摆,沿圆弧的切线有虚位移Sr。虚位移与实际位移是两个截然不同的概念。虚位移只与约束条件有关,与时间、作用 力和运动的初始条件无关。实位移是质点或质点系在一定时间内发生的真实位移,除了与约束条件有关以外,还与作用在它们上的主动力和运动的初始条件有关。虚位移是任意的 无限小的位移,在定常约束下,虚位移可以有沿不同方向的虚位移。2.虚功力在虚位移上作的功称为 虚功,用aw表示,即W = F?&(14-4)虚功与实际位移中的元功在本教材中的符号相同
29、,但它们之间有着本质的区别。因为 虚位移是假想的,不是真实位移,因此其虚功就不是真实的功,是假想的,它与实际位移 无关;而实际位移中的元功是真实位移的功,它与物体运动的路径有关。这一点上学习时 应当注意。3. 理想约束如果约束力在质点系的任意虚位移中所作的虚功之和等于零,这样的约束称为理想约束。若用FNi表示质点系中第i个质点所受的约束力, ari表示质点系中第i个质点的虚位 移,则理想约束为s、.w 八 FNi=o(14-5)i 1将第12章的式(12-11 )中dri变换为ari即可。如光滑接触面、铰链、不可伸长刚杆(二 力杆)等均为理想约束。将第12章的理想约束推广到某些非定常约束,也能
30、成为理想约束。例如变长度摆,如图14-5所示,绳的约束力在实位移上作的功Ft ?dr工0,但虚位移上的虚功FT ?a = 0,因而也是理想约束。l(t)i.图 14-5虚位移原理虚位移原理:具有理想、双侧、定常约束的质点系其平衡必要与充分条件是:作用在 质点系上的所有主动力在任何虚位移中所作的虚功之和等于零。即n、W F 八 Fi m = 0(14-6)i 1式(14-6)的解析式为n7 (FxXi + Fyi y + Fzi'.Zi ) = o(14-7)i 4虚位移原理由拉格朗日于1764年提出的,又称为虚功原理,它是研究一般质点系平衡的普遍定理,也称静力学普遍定理。虚位移原理的必
31、要性证明:当质点系平衡时,质点系中的每个质点受到主动力Fi和约束力FNi而处于平衡,则有Fi + Fn =0 (i =1,2,n)将上式两端冋乘以 Sri,并连加得由于质点系受有理想约束,即nn、Fi +、 FNii Ai 1n=0' = 0i 4n则有J.WF = 1: Fj 、:= 0i 二虚位移原理的充分性证明:假设质点系受到力系作用时,不处于平衡状态,则作用在质点系上的某一个主动力Fi和约束力Fm其在相应的虚位移上所作的虚功必有(Fi Fz )-0由于质点系受有理想约束,即*ySre 牡AC贏F1欢SrrAF2图 14-6n' FNii = 0i壬则对于质点系有:W F
32、 = ' Fi=0i2这与式(14-6)矛盾,质点系必处于平衡。例题14-1如图14-6所示的机构中,当曲柄 OC绕轴O转动时,滑块 A沿曲柄滑动,从而带动杆AB在铅直的滑槽内移动,不计各杆的自重与各处的摩擦。试求平衡时力Fi和F2的关系。解:作用在该机构上的主动力为力F!和F2,约束是理想约束,且为 1个自由度体系。有如下的两种解法:(1)几何法如图14-6所示,A、C两点的虚位移为:rA,、:rc,则由虚位移原理式(14-6)得F2、a Frc =0(1)由图中的几何关系得、Jc=、rA cos aOA、 r a cos :Icos ;:a -a C0aI(2)式(2)代入式(1)
33、,得cos2F2、rA -F1、rAa = 0I(F2 -F1cos2 '、. 门 a)、rA =0 I由于虚位移为:Ta是任意独立的,则F2 -F1有关系为F1 _ I F2 a cos2(2 )解析法由于体系具有1个自由度,广义坐标为曲柄 OC绕轴O转动时的转角,则滑块A在 图示坐标系中的坐标为y =lta n :滑块A的虚位移为C点的虚位移为c 二 ' (a :)二a、.::将点A、C的虚位移代入式(1)得彳才-齐宀°由于广义虚位移:是任意独立的,则有F22 - Fi a = 02cosF! _ I F2a cos2 :例题14-2如图14-7所示的平面机构中。
34、已知各杆与弹簧的原长为I 滑块A重为P,弹簧刚度系数为k,铅直滑道是光滑的。试求平衡时重力 系。图 14-7解:去掉弹簧的约束,以弹力 F、F 代替,体系的约束为理想约束, 和弹力F、F 的作用下处于平衡。 此体系具有1个自由度,广义坐标为 理式(14-6)得在主动力重力P71,则由虚位移原主动力作用点的坐标为-P y a _F、Xb F、Xd =0(1)则各作用点的虚位移为上式取变分,得yAX BXd=2l sin v=l cos v=T cos v& AOx B©Xd(2)(3)弹簧的弹力F、F为F =F =k(2l cos v J)将式(2)和式(3)代入式(1),得-
35、P2I cos 九 V k( 21 cos v -1)1 si nr、, v k( 21 cos r -1)1 si n m - 0整理得P kl (2sin v -tan 二)、二-0由于广义虚位移是任意独立的,则有-P kl (2 sin v -tan r) =0即得平衡时重力P与二之间的关系为P =kl (2sin v -tan 旳例题14-3 一多跨静定梁受力如图14-8a所示,试求支座 B的约束力。c-D23mE4m4m, 3m6m6m1G M(a)F2"C"Fb(b)图 14-2解:将支座B处的约束解除,用力 FB代替。此梁为1个自由度体系。由虚位移原理式(14
36、-6)得-Fi、 Fb、g F2、2 M、d -0Fb其中,各处的虚位移关系为 从而得支座B的约束力为h£g4=11' * 81、rE 1*'B66、B3 r2 _ 3636Tb1 11 11=12 8961 1111FbF1F2M2 896以广义坐标表示的质点系平衡方程设由n个质点组成的质点系,受有s个定常完整约束,系统的自由度为k = 3n -s,对质点系中第i个质点的广义坐标求变分,由式(14-2)得k ?xi八?-q jj 土?qjk ?yi八?一 qj j土?qjk ?乙(i =1,2;,n)(14-8):Zi八qjj土? qj其矢量式为(i =1,2,n)
37、式(14-8)代入式(14-7)得nk ? x、Wf 八 FL 1j土?qjk n? x八 r (F= Fyij去i去q jk ? y iqj)+ F,(q)+FziC oj土?qjj?q jy i ? zi+ Fzi L)b qj = 0qj?Zi qj)qj(14-9)二?xiQj 八(Fxi -+ Fyii 1? qjn? r八Fi亠y?qj式(14-10)代入式(14-9)yi?+Fz$)?qj ? qjyi(j =1,2,k)14-10)、.WF =二 Q j q j = 0j壬其中,Qjgj具有功的量纲,Qj称为与广义坐标 由于广义坐标qj具有独立性,式(14-11)有Qj = 0
38、曰qj对应的广义力。(14-11)14-12)(j =1,2,k)即质点系平衡的必要与充分条件是:系统中所有广义力都等于零。式 平衡方程。求广义力有两种方法:一是直接从式(14-10)中求出,另一中求法是利用广义坐标具有独立和任意的性质,令某一的虚位移§qj工0,其余的k -1个虚位移为零,则有、wF = Qj、q(14-12)广义力表示的从而(14-13)Qj=业j 沖在实际求解中常采用第二种方法。 例题14-4平面机构在如图14-9所示位置上平衡,已知在曲柄 AB上作用有力偶矩 M ,1在铰链C处,受有水平力F。AB二丄CD =1,各杆的重量和摩擦不计,试求水平力P与力2偶矩为M
39、的关系。-3060 -f60 D图 14-9解:此机构为2个自由度体系。设广义坐标为曲柄AB与水平轴的夹角,滑块D的水平位移rD。(1) 求广义坐标所对应的广义力令滑块D不动,虚位移、;Xd =0,则广义力cdW1M 揶Fcso30°6r1Q1 二1 、图示位置,杆CD可以看成瞬时平移,则有6匚=§rB =16®代入上式,再由质点系平衡的必要与充分条件是:系统中所有广义力都等于零。则Q1 = 0-Fcso30°L :M -Fcso30°l =0则水平力F与力偶矩为M的关系为F M Icso30°(2)求广义坐标xD所对应的广义力令曲柄
40、AB不动,虚位移 护=0。此时体系相当于 BC为曲柄,杆CD为连杆组成的曲 柄连杆机构。铰链(a)广义力为由质点系平衡条件则水平力将式(a)C处的虚位移扁2垂直于杆BC,由速度投影定理得,-.r2 = ,'.rD cos 60°iW2P6rD -Fcso60 6r2Q2 =、XdP、rD - F cos 60 rD cos 60oQ2 = 02P - F cos 60° =0F与P的关系为2 oP = F cos 60代入式(b)得水平力P与力偶矩为M的关系为M 2“o、3MPcos 60Icso30o6l14-5如图14-10所示两重物A和B,重量分别为 只和P2
41、,并系在细绳上,分别 C,重(b)例题放在倾角为二和一:的斜面上,绳子绕过两个定滑轮与动滑轮相连。动滑轮上挂重物 量为P3的重物。若滑轮和细绳的自重以及各处的摩擦不计,试求体系平衡时,Pi、P2和P3的关系。图 14-10解:此机构为2个自由度体系。设广义坐标为重物A沿斜面向下的位移为 S!和重物B沿斜面向上的位移为S2。重物C的竖直位移为S3。(1 )求广义坐标所对应的广义力令重物B不动,虚位移.s2=0,则广义力、Wi P1 sin 二 s1 - P3、s3SiS3 =丄、S由运动关系得则上式为1wp1 Sin "1 P3 丁 S1Q1 =甘a 1二 P1 sin 八 P3 2由
42、质点系平衡条件Qi = 0P3 =2R sin j(2)求广义坐标 飞2所对应的广义力令重物A不动,虚位移js=0,则广义力酗2PaSaPzSin 陀S2Q2(a)由运动关系得则上式为Q旳2由质点系平衡条件由式(a)和式(b)得Pi、2Pr,S2丄S22P3S2卩2 Sin:注22-S2=P3P2 sin I :2Q2 =02P2 sin :二 2P2 sinP2和Pa的关系为sin t1 - P3 =2P2 sin l-:,(b)当主动力是势力时,势能也是广义坐标的函数,即V 二V(qi,q2, ,qk )主动力与势能的关系由(12-27 )有Fi = -(?-Vi + -?Xi?yi? V
43、+ ?Zik)(i =12,n)(14-14)虚位移为::q jfcx i:y i? Zi-i +- j +- k?qj ? qj ?qj(i =1,2,n)(14-15)kQj 八 Fi j 土将式(14-14)和(14-15)代入(14-10)得qj/竺竺+空虽+空二 j 土? Xi ?q j ? yi ? qj ? Zi ? qj?V14-16)则虚位移原理的平衡方程式(14-12)变为?V? =0 ?qj(j =1,2,k)14-17)或者为14-18)V= 0即在势力场中,具有理想、双侧、定常约束的质点系平衡的必要与充分条件是:势能对每 个广义坐标的偏导数都等于零,或者势能在平衡位置
44、取驻值。例题14-6例题14-2用广义坐标法,求试求平衡时重力P与r之间的关系。解:此机构为1个自由度体系。广义坐标二。设铰链C为重力的零势能点,弹簧为原长为弹力的零势能点,则体系的势能为1 2V =2PI sin k( 21 cos v -l)2虚位移原理的平衡条件,V= 0得、.V =2PI cos 二.n k(2l cosn -I)( -21 sin m)二2Plcos v k(2I cos J -l)( -2I sin 旳、二-0由虚位移是任意独立的,则得P = kI ( 2 sin : -tan 二)14.3 本章小结1 约束自由度广义坐标约束分为以下形式:(1) 几何约束:限制质点
45、或质点系在空间的几何位置的条件。(2) 运动约束:约束限制质点或质点系运动的条件。(3 )定常约束:约束方程中不显含时间的约束。(4 )非定常约束:约束方程中显含时间的约束。(5) 非完整约束:约束方程中含有坐标对时间的导数,而且方程不能积分成有限形式,(6) 完整约束:约束方程中不含有坐标对时间的导数;或约束方程中含有坐标对时间 的导数,但能积分成有限形式。(7) 双侧约束:约束限制物体沿某一方向的位移,同时也限制物体沿相反方向的位移。(8) 单侧约束:约束仅限制物体沿某一方向的位移,不能限制物体沿相反方向的位移。自由度:确定具有完整约束的质点系位置所需独立坐标的数目,用k表示。广义坐标:确
46、定质点系位置的独立参量,以qq2,,qk表示质点系的广义坐标。由n个质点组成的质点系,受有 s约束,自由度为k,则质点系第i个质点直角坐标 形式的广义坐标为Xi =Xj(q! ,q2,,qk ,t)b =yi(q1 ,q2,q ,t)(i =1,2,,n)Zi =Zi(q1 ,q2,qk ,t)矢量形式为2. 虚位移虚功理想约束虚位移:质点或质点系为约束所允许的无限小的位移。虚功:力在虚位移上作的功。理想约束:约束力在质点系的任意虚位移中所作的虚功之和等于零。即s1 W =' F N *-' r i =0i i3. 虚位移原理具有理想、双侧、定常约束的质点系其平衡必要与充分条件
47、是:作用在质点系上的所 有主动力在任何虚位移中所作的虚功之和等于零。即n:W F = L Fi 、 = 0i i解析式为n'二(Fxi、Xi + Fyi、y + Fzi、Zi) = 0i 14广义坐标表示的质点系平衡方程(1 )一般的平衡问题 广义力:nQj 八(Fxi ? y ?qjn? r八Fi 尸i 土? qj也+F.i? yi?Zi:+ F i )i?q j ? qjZi(j =1,2,k)广义力表示的平衡方程:即质点系平衡的必要与充分条件阜 (2)当主动力是势力时 广义力:疋:Qj = 0系统中所有广义力都等于零。Qj? qj其中,势能是广义坐标的函数,即V =V(q1 ,q
48、2 ,qk )。平衡方程:?V馮=0(j =1,2,k)或者为附=0即在势力场中,具有理想、双侧、定常约束的质点系平衡的必要与充分条件是:势能对每 个广义坐标的偏导数都等于零,或者势能在平衡位置取驻值。第15章分析力学基础在这一章里,我们将达朗贝尔原理与虚位移原理结合起来,给出动力学普遍方程和拉 格朗日方程。它们是分析力学的基础,是解决非自由质点系动力学问题的最一般原理。15.1动力学普遍方程设质点系由n个质点组成,应用达朗贝尔原理,第i个质点的惯性力FN=- miai,则作用该质点的主动力约束力Fz、惯性力Fh构成平衡力系。其平衡方程为Fi + FNi + FIi = 0(i=1,2, ,
49、n)质点系受到理想、双侧约束时,依据虚位移原理有n' (Fi + Fm+ F")瓠J = 0i 4若质点系受的理想约束,即n二 F Ni * r i = 0i i则n' (Fi + Fu )J = 0( 15-1)i =1或者n' (Fi ma) = 0( 15-2)i 4式(15-1 )或(15-2)称为动力学普遍方程,也称为达朗贝尔一拉格朗日方程 。它表明: 具有完整、理想、双侧束的质点系在运动的任一瞬时,作用在质点系上的主动力和惯性力 在任一组虚位移中所作的元功之和为零。它建立了质点系动力学问题的普遍规律,特别是对于非自由质点系来说,在求解时不必考虑未知
50、的约束力,只需研究主动力,从而大大地 简化了计算过程。式(15-2)的解析式为nx ( Fxi -m iaxih Xi +(Fyi mjayi )、y + (Fzi miaz) zJ=O( 15-3)i 1在应用动力学普遍方程求解时应遵循以下步骤:(1)判断系统是否是理想、双侧约束,确定系统的自由度;(2)计算主动力和惯性力,对于刚体而言将惯性力进行简化;(3)确定系统的虚位移;(4)由式(15-1 )或(15-2)进行计算。例题15-1如图15-1所示的滑轮系统,动滑轮上悬挂质量为mt的重物,绳子绕过定滑轮后悬挂质量为 m2的重物,设两均质滑轮的质量为m,半径为r,绳的质量及轮轴处的摩擦不计,试求定滑轮的角加速度及质量为m2的重物加速度a 2图 15-1ma 1 ,(1)(2)解:取整个滑轮系统为研究对象,系统为完整、理想、双侧束的约束,所受到的主动 力为m、m2g和mg,惯性力为重物:=m1a1, F =口2玄2,轮:12 12M |1 mr a1 , M丨2 mr a2,则由虚位移原理得2 2-(mp mtaJj.St - M 门 丫 h ( m 2g - m2a2)、s2 -
温馨提示
- 1. 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
- 2. 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
- 3. 本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
- 4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
- 5. 人人文库网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
- 6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
- 7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
最新文档
- 机械厂工艺流程准则
- 2026学年江苏省宿迁市四年级数学期末自我评估核心强化题(附答案)详细答案和解析
- 2026学年江苏省太仓市六年级数学期末提升知识串联题(详细参考解析)详细答案和解析
- 2026年云南高考地理试题答案详解及复习备考指导
- 网络安全与信息保密管理制度
- 房屋合同模板集锦9篇
- 2026学年湖南省张家界市六年级数学期末通关黑金提分题附答案详细答案和解析
- 2026学年山东省二年级数学期末通关重点试卷详细参考解析详细答案和解析
- 2026学年福建省晋江市南安市四年级语文期末评估思维拓展题(详细参考解析)详细答案和解析
- 停车场ETC无感支付施工方案及技术措施
- 2025年地质录井技能考试地质录井技能考试微信做题(题库版)附答案
- 弱电安防施工组织方案
- 2026年餐饮业店长招聘面试考核要点详解
- 分手费协议书模板
- 服务区管理员岗位笔试试题及答案
- 2025年广东省第一次普通高中学业水平合格性考试(春季高考)生物试题(含答案详解)
- 茶企业文化介绍
- 成都市高中新生入学考试化学试题汇编
- 2024-2025学年江苏省无锡市江阴市七年级下学期期末历史试题
- (正式版)DB65∕T 3722-2015 《土地整治工程建设标准》
- 实施指南(2025)《JTT 1537.3-2025 近零碳交通设施技术要求 第 3 部分:港口作业区》
评论
0/150
提交评论