



版权说明:本文档由用户提供并上传,收益归属内容提供方,若内容存在侵权,请进行举报或认领
文档简介
1、盛电机MICROMOTORSVoL47 No4Apr. 2014第47卷第4期2014年 4月一种改进的静止型永磁同步电机离线参数辨识方法唐斌,游林儒,黄招彬(华南理丁大学门动化科学与丁程学院.广州510640)摘要:提出了一种改进的皋F高频旋转电斥注入的离线参数辨识方法町以同时辨识水磁同步电机的定子电阻、 电感与转子磁极初始位置并基本保持转子不动该方法给定子注入高频旋转电压.产生的电流中育冇结构凸极效应 或者饱和凸极效应引起的转子磁极位宜信息和起轴磁路非线性饱和引起的转子磁极极性信息。设计转子磁极位迓信 息捉取方法与闭环调筋结构.实现J"转子磁极初次辨识角度跟踪:同时设计转子磁极极
2、性信息捉取方法.实现转子 磁极极性判断.待闭环跟踪稳定后.通过提取感应共模信息与差模信息來测虽定子电感,消除了直轴磁路非线性饱 和对血轴电感检测的影响。最后.在转子磁极方向注入個定电压采用曲点式伏安法测旺定子电阻.消除r脉宽调 制中死区与窄脉冲限制对定子电阻检测的影响该方法实现了转子无转动离线辨识定子电阻、电感与转子磁极初始 位迓并X在空载、满载和堵转惜况下均适用.Matlab仿哉与永磁同步电机实验验证了该方法的优越性能.关键词:水磁同步电机;矢呈控制;转子磁极初始位邊;岛频旋转电斥注入;定子电阻与电感中图分类号:TM35!; TM341文献标志码:A文章编号:10014848 (2014 )
3、044)049祝An Improved Offline Parameter Identification Strategy atStandstill for PMSMTANG Bin. YOU IJnru, HUANG Zhaobin(College uj Automation Science and Engineering, South China University of Technology,Guangzhou 510640, China )Abstract: An advanced offline parameter idenlification strategy* based on
4、 high frequency rotating voltage injection (HERVI ) was proposed for identifying stator resistance9 inductance and initial n)tor position in permanent magnet synchronous motor (PMSM ) without n)tor inovement. As injecting HF rotating voltage into the stator coils 9 the response current includes n)to
5、r position information caused by interior PMSM xs spatial sa- liency or surface-tnounted PMSM s saturation saliency f and the polarity information caused l)y nonlinear saturation of (lirect-tixis magnet field. A closed loop scheme for rotor |M)sition tracking and |M)larity delecting was de»igii
6、ecl. When llir closed loop goes sleady llie induction comivioii inode iiifoniialioii and diflerence mode information were used to detecting the direct-axis and quadrature-axis inductance, where the impact on d-tix is inductance sensing by nonlinear saturation of direct-tixis magnet field was elimina
7、ted. Finally, stator resistance was calculated with two-point volt-tunp method by injecting steady voltage on the rotor position, which eliminated the impact of the dea(14)cin(l and leasl-|)iilse-ufi(hh limitation in pulse width modulation (PW1 ) This strategy can achieve stator resistance, inductan
8、ce and initial rotor jx)sition without rotor movement t wherever at no load« full load or locked-rotor case. Both Matlab simulation and experiment taken on interior PMSM show its excellent |)erf()nnance.Key words: pennanent magnet synchronous motor; vector control; initial rotor position; high
9、frequency rotating voltage injection; stator resistance and inductance0引言效等待点.其在电力拖动中的应用也越来越广泛。 水磁同步电机一般采JIJT转子磁琏定向的矢量控永磁同步电机ihTR冇良好的控制性能和高能制方法.而矢量控制中需要对转子磁极角度进行解 收稿日期:2013 -08 -05作者简介:唐 斌0988 ).男.硕士研究生.研究方向为电力电子技术与运动控制。游林儒0956 ).黄材形(1980 )男.教校.博士生导师.研究方向为电力电子技术与运动控制、嵌入式系统及信号处理。男.博士研究生.研究方向为电力电子技术与运
10、动控制。71994-2014 China Academic Journal Electronic Publishing House. All rights reserved, 4期唐斌等:一种改进的禅止熨永磁同步电机离线畚敦辩识方法SVTj=JVSIPW MPosition S|w-rd .Calm lai ion耦,同时耍求定子电阻与电感进行电流环控制参数 口适应。因此,在永磁同步电机控制之前,对定子 电阻、电感与转子磁极初始角度进行离线参数辨识 极其审耍。定子电阻的测就一般采用万用农与电桥 等仪器宜接手动测就;或者采用伏安法4,通过给 定子线圈注入一定幅值的电压并检测稳态时的电流, 山电压
11、和稳态电流i|算定子电阻。但伏安法中注人 固定方向的电压必然导致转子的不确定运动.而这 在某些应用场合是不允许的。定子电感的测就通常 有两种方法。一种是利用电机的定子电阻与电感串 联模型,给某个方向注入恒定电压,检测电流上升 过程的时间常数,通过串联模型的时间常数与电阻 即町计算电感,但此方法不能同时测量虫轴电感和 交轴电感。另一种是给定子注入高频旋转电压, 由稳态时电流幅值的垠大值与最小值.町以计算出 出轴电感和交轴电感.但转子磁极方向的磁路非线 性饱和严亚影响出轴电感的测量,同时此方法缶要 单独注入电压信号,增加了离线参数辨识的时间。永磁同步电机的转子磁极初始位置辨识过程一 般分为两个步骤
12、:第一步,利用内嵌式永磁同步电 机的结构凸极效应或者农贴式永磁同步电机的饱和 凸极效应确定转子磁极的初次辨识角度;第二步, 利用定子铁心的非线性饱和特性确定转子磁极的N 极方向。针对永磁同步电机的转子磁极初始位置辨 识问题.国内外学者提出了很多方法,按照注入信 号的特征主耍分为三类:垄于等宽脉冲电压注入的 辨识方法*、基于高频正弦电压注入的辨识方 法Z和第于高频旋转电斥注入的辨识方法22。这 些辨识方法通常都是将初次磁极位置辨识与磁极极 性判断分开实现,便得整个辨识过程时间变长.步 骤繁琐。针对这吐问题.本文提出了茶于高频旋转电压 注入的静止型离线参数辨识改进方法。该方法通过 给定子注入幅值恒
13、定、方向高频旋转的电压,检测 响应电流信号并提取该电流中的转子位置信息与磯 极极性信息.其中转子位谊信息经变换后构建初次 转子位进闭环跟踪算法.磁极极性信息经变换处理 进行转子磁极极性判断.二者同时进行。待闭环跟 踪稳定后.通过提取感应共模信息与差模信息来测 量定子电感以消除立轴磁路非线性饱和对直轴电感 检测的影响。最后.在转子磁极方向注入恒定电斥 采用两点式伏安法测就定子电阻以消除脉宽调制中 死区效应与窄脉筑:限制对电阻检测的影响。该方法 实现了无转动离线辨识定子电阻、电感与转子磁极 角度.同时将多个步骤进行融合,冇效缩短了辨识 时间,另外该方法在空载、滿栽和堵转惰况下均适 用。1allal
14、)仿真与永磁同步电机实验结果验证了该 方法的优越性能。1转子磁极初始位置估计1.1永磁同步电机的矢量控制永磁同步电机一般采用堆于转子磁链定向的J =0矢就控制方法.如图1所示Park变换与Park 逆变殃所需的解耦角度仇为转子磁极位置(旋转坐 标系d轴)到静止坐标系a轴的夹角(电角度)。式 (1 )、式Q )为永磁同步电机等效电路方程。叫=R.J + 月- Ag(1 )叫二g +£心+人。)式中,叫、分别为d轴和q轴电压,匚和s分别 为d轴和(/轴电流.忆为电枢绕组相电阻.叫为转 子角速度.人厂A“分别为d轴和y轴磁链。图I永磁同步曳引机矢至控制給构图1.2永磁同步电机的结构特点永磁
15、同步电机按转子结构分类.主要冇两种: 内嵌式永磁同步电机anterior PMSM. IPMSM )和表贴 式永磁同步电机(Surface-tnounted PMSM . SPMSM )o 其中.IPMSM具有明业的结构凸极效应,即d轴磁 阻大于q轴磁阻;而SPMSM没冇明显的结构凸极效 应,即d轴磁阻与g轴磁阻甚本相等。在永磁同步电机的y轴方向.磁路的非线性饱 和待性如图2所示,当磁路中磁链较小时(A, < 儿),磁链A,与磁路方向上的电流 卑本呈线性变 化;当磁路中磁链较大时(A,MA°)磁链入与磁 路方向上的电流A逐渐呈非线性变化.即表现出磁 路饱和特性。为了充分利用永磁
16、体,永磁同步电机 一般会将转子水磁体磁路设计为接近磁路饱和(即 Am>A0)o其中Ao、九分別为临界饱和磁链、永 磁体磁链。图2永磁同步电机的非线性磁路饱和那么.在永磁同步电机y轴方向.磁链完全由 电流产牛.没有永磁体磁链分就冈而磁链入与电 流4的关系对近似衣示为5 iqAg < Ao厂G; - <0 )2人再人) 式中,4为磁路未表现出饱和特性时的y轴电感, /<= -卜寻G。)>0为表现出饱和待性时的电感变2此化系数,二为临界电流。在永磁同步电机轴方向.磁路中存在永磁体 磁链A,.,同时永磁同步电机矢就控制中一般电流J 都较小,磁链Arf基本匚作在A. MAo
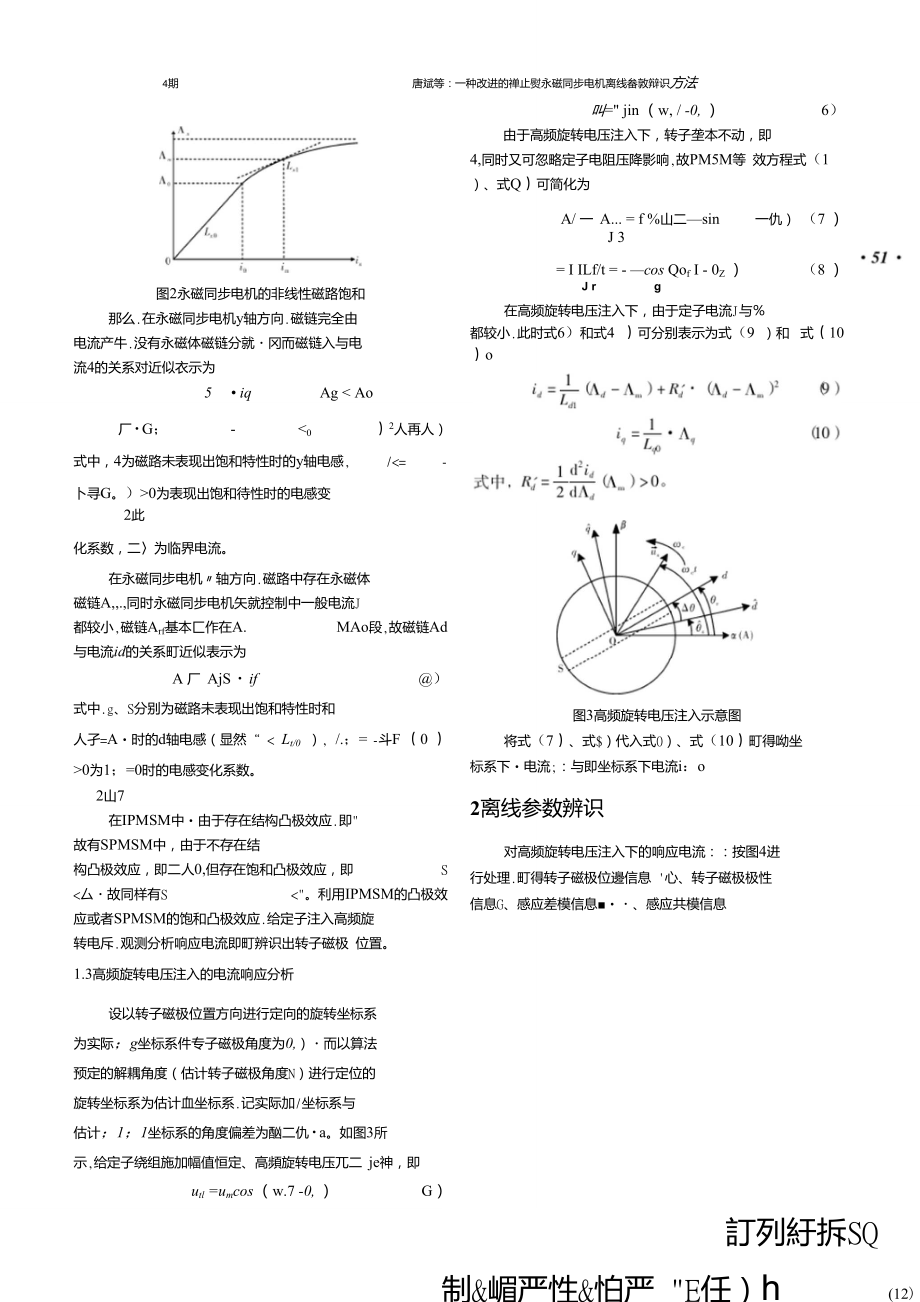
17、段,故磁链Ad 与电流id的关系町近似表示为A 厂 AjS if)式中.g、S分别为磁路未表现出饱和特性时和 人孑=A时的d轴电感(显然“ < Lt/0 ), /.;= -斗F (0 ) >0为1;=0时的电感变化系数。2山7在IPMSM中由于存在结构凸极效应.即" 故有SPMSM中,由于不存在结 构凸极效应,即二人0,但存在饱和凸极效应,即 S <厶故同样有S <"。利用IPMSM的凸极效 应或者SPMSM的饱和凸极效应.给定子注入高频旋 转电斥.观测分析响应电流即町辨识出转子磁极 位置。1.3高频旋转电压注入的电流响应分析设以转子磁极位置方向进行
18、定向的旋转坐标系 为实际;g坐标系件专子磁极角度为0,)而以算法 预定的解耦角度(估计转子磁极角度N)进行定位的 旋转坐标系为估计血坐标系.记实际加/坐标系与 估计;1;1坐标系的角度偏差为酗二仇a。如图3所 示,给定子绕组施加幅值恒定、高頻旋转电压兀二 je神,即utl =umcos (w.7 -0, )G)叫=" jin (w, / -0, )6)由于高频旋转电压注入下,转子垄本不动,即4,同时又可忽略定子电阻压降影响,故PM5M等 效方程式(1 )、式Q)可简化为A/ 一 A. = f %山二sin一仇) (7 )J 3= I ILf/t = - cos Qof I - 0Z
19、)(8 )J rg在高频旋转电压注入下,由于定子电流J与 都较小.此时式6)和式4 )可分别表示为式(9 )和 式(10 )o图3高频旋转电压注入示意图将式(7)、式$)代入式0)、式(10)町得呦坐 标系下电流;:与即坐标系下电流i:o2离线参数辨识訂列紆拆SQ制&嵋严性&怕严 "E任)hai)(12)对高频旋转电压注入下的响应电流:按图4进 行处理.町得转子磁极位邊信息 '心、转子磁极极性 信息G、感应差模信息、感应共模信息71994-2014 China Academic Journal Electronic Publishing House. All
20、rights reserved, 52 撤电机图4高频旋转电压注入下的电流信号处理 i即式(13)式 06) Im LPF G: ) esin2 一 仇)ig LPF Re C: e" ) cos2 S/ -仇)= r “彳 、2.-y(j cos2(df -0, )cos © -f),)- Re LP F G: ew ) - /("“) = 釜仕十阳to.-a.)亠LPFC: 宀)佥任+*)(13 )(14 )(15 )(16 )由式Q3)町知.-y.号)范围内,当 弘>0时.>0;当M<0时,认<0。根据让的 特性,町设计图5和图6所示
21、闭环负反馈结构,最 终使得ipo,*0,即=0 de = tto同时,可通过 口的符号来判断转子磁极极性:若心<0,那么酗 二 0 ,即仇二 A ;若 > °,那么 = TT, e, = 0t图6基于高频旋转电压注入的转子位爲跟踪器在闭环调节基本稳定后,式(15 )町简化为(17 )litI£-五根据式(16)、式(17)得1“ =丄(18 )(19)因此,在转子磁极位置跟踪的同时,可根据式Q8)、 式(19 )将定子电感“与如进行辨识。转子位置辨识完成丿旨,在转子磁极方向分阶段 注入恒定电压“z和仏7 <"*),持续足够时 间以保证电流达到稳定
22、状态并测就語坐标系中d轴 电流iz和iz,则定子电阻&为R、="心 一G0 )-采用两点式电阻测量方法可消除脉宽调制中死 区效应和窄脉宽限制的影响。同时,山于注入电压 的方向为转子磁极方向,因而产住的电流与转子磁 极亜合.不产生运动力矩,转子不会发牛转动。3仿真与实验3. 1内嵌式永磁同步电机的Matlab仿真分析本节电压、电流与角度所用标幺ffi (i)u ),分别 以母线电压537 V、额定电流峰值、360。为応准进行 标幺化。在Matlab中建立转子磁极方向存在非线性 饱和恃性的IPMSM模型,电机参数如表1所示。在 离线参数辨识仿真系统中,设置载波頻率为10 kHz,
23、 转子位宜辨识汪入旋转电压福值为0. 8 "/频率为 500旳进行转子位蛙与定子电感辨识.然后在转子 方向上分阶段注入0.05 pu与0. 1 pu的电斥辨识定 子电阻。表1内嵌式永磁同步电机参数参数名称标称值 参数名称 标称值额定电流/A26.5相电阻/n1.2離定频率/Hz28d轴电感/mH10额定转速/ <r min ")168q轴电感/mH26额定功率/kW11.7极数20在四个象限中取若干测试点,如分別设置仇=0.于,号.苧.口学苧.于,离线参数辨 识过程中转子位罟辨识响应如图7 )中所示.转子 位置信息域终都收敛到零,磁极极性判断止确,转 子位置辨识结果与
24、实际转子位置吻合;定子电感辨 识响应如图7 (b)中所示,血轴电感与交轴电感分别71994-2014 China Academic Journal Electronic Publishing House. All rights reserved, 4期唐 试等:一种改进的挣止/永世同步电机离线务敎沸识方法5371994-2014 China Academic Journal Electronic Publishing House. All rights reserved, 4期唐 试等:一种改进的挣止/永世同步电机离线务敎沸识方法53为II mlI与28 inIL与标称值吻合。32交流氷磁伺服
25、电动机的实验分析采用堆于TMS320F28035控制器的伺服控制系 统.以型号为GT125S172R的交流永磁伺服电动机 (电机参数如表2所示)为实验对象,进行永磁同步 电机离线参数辨识方法的实验。在实际转子位置为 0.70凶时.离线参数辨识过程如图8所示,磁极位 蛙信息A:0. 1 s内收敛到零.磁极极性信息判断极性 正确,辨识结果为转子位置0.713卩口、直轴电感 7.8 mH、交轴电感9.5 mH、定子电阻0.752 Q,与 标称值基本吻合。在一对极下360。范吊【内等间距取 20个测试点,转子位趙辨识结果如图9所示,误差 在±5。范圉内.完全满足匚业应用要求。参数名称标称值参
26、数名称标称值糊定电流/A26.8额定功率/kW13.4额定频率/Hz113. 33额定电压/V380额定转速/1 700线反电孙/176(r niin"1 )V7 (kr min-1 )额定转矩/Nm75定子电Rl/n0.7直轴电感/mH7交轴电感/mH9表2交流永磁伺服电动机参数转子位置碎识0.80.60.40.200 2转子位!8极息 匕战大1()0匍00 磁极位丸伯d转子位置共植佰息0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 I电感綁识00.5电阻绅识注入电压方向而伽应电渝注入电压醒一0图7基于高频旋转电压注入的参数辨识仿真图8基于髙频旋转电压注
27、入的参数辨识实验ri30020010()o0 36 72 108 144 180 216 252 288 324 360 实际角度36 72 108 144 1H0 216 252 288 324 360 实际角度/I。)图9高频旋转电压注入法的转子位宜辨识实验71994-2014 China Academic Journal Electronic Publishing House. All rights reserved, 544结语圣于高频旋转电压注入的静止型离线参数辨识 改进方法.通过给定子注入幅值恒定、方向高频旋 转的电斥可同时进行初次转子位置闭环跟踪、转 子磁极极性判断与定子电感辨识
28、;然后在转子磁极 方向上采用曲点式伏安法町以准确辨识定子电阻。 该方法实现了无转动离线辨识定子电阻、电感与转 子磁极初始位社.并将多个步骤进行融合.冇效缩 短r辨识时间,同时该方法在空载、満载和堵转悄 况卜均适用。Matlab仿真与永磁同步电机实验结果 均验证了该方法的有效性与便捷性。参考文献HJ王松.水破同步电机的参数綁识及控制策略研究北京: 北京交通大学.2011.12J曾祥公.水磁同步电机无位肚传感器控制技术研究D.上海: 同济大学.2009.13 J Nakasliinia S. lnagaki、 Miki 1. Sensotlrss Initial Roloi Position EM
29、iination uf Suifdcr IVinuinml-fnagix-t Sync hronous Moloi J ln (lustiy Applicationsv IEEE Tiaiisactioiis on, 2000 36 (6 ): 15984603.14J韦欺 金辛海.表曲式水磁同步电机初始转子位程佔计技术 JJ.中国电机丁程学报.2006 Q2 ): 1047095 | Jung-lk H. I<lr K. SdVa T. el al. Srnsoilrss Roloi Position Eslinia- li<in of an Irilriior Pmiianrn
30、t-inagn<*l Motor fioin Inilial Slult-H J.IikIuhUv Applications IEEE Trannat tionn »n 2003. 39 (3 ): ?61467 6 Gaolm W. Gu<jqiai)g Z Rongfmg Y H al. Rolnut Ixm Ghi- Irol Schemtt of Diwcl-Olive Gearies” Traction Machine f(n Elrvah»i>i Without a Weight Ttaiuducer J J Industry Applicat
31、ions. IEEE Tiun«Mt<-li<»nK <>nt 2012 48 6 ): 996-1005.Hyunbae K. Kum-Kang H Lnriiz R D. el aL A Novel Method fbi Inilial Rotor PoMlion Enliinaticm for I PM Synchmnoiisi Machinr Diiven .J_ lnihhdry Applications9 IEEE Tiansditioiu on. 20041 40 (5 ): 1369737 && ii-m*(>K
32、 J, Ijoiviu R I). Jahns T M. rl al. Initial Rotoi Posilion Es-tiiniiiion of an Inlriioi PrinuinrnMiuignrt SyncImmoiK Mac liinr I sing Carrier-fm|urncy Inaction Methods J 一 hiduTry Applkutions IEEE TianNiM'tions on. 2005.41 (1 ): 38-45.9_ Biam hi N. Bolognani SJ el al. C<>tn|MriM)n of PM MotoiSliiicliiiv* and ScnsoikM GhHioI Tr< hniqiir foi Zr>-Sxrl RiHob Position lX*tr<ii<)n J Pown Elr<*h<>nics IEEE Transac
温馨提示
- 1. 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
- 2. 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
- 3. 本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
- 4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
- 5. 人人文库网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
- 6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
- 7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
最新文档
- 2025宁夏公路勘察设计院有限责任公司招聘10岗21人笔试历年难易错考点试卷带答案解析
- 2025国网经济技术研究院有限公司招聘高校毕业生约12人(第二批)笔试历年常考点试题专练附带答案详解
- 2025国元金控集团所属企业招聘25人笔试历年难易错考点试卷带答案解析
- 2025四川启睿克科技有限公司招聘软件工程师岗位1人笔试历年难易错考点试卷带答案解析2套试卷
- 2025凯欣粮油有限公司招聘12人(重庆)笔试历年常考点试题专练附带答案详解
- 2025内蒙古森工集团招聘高校毕业生114人(第二批)笔试历年典型考点题库附带答案详解
- 2025内蒙古兖矿能源集团股份有限公司校园招聘350人笔试历年备考题库附带答案详解
- 2025云南玉溪高新区融创投资有限公司招聘合同制工作人员2人笔试历年备考题库附带答案详解
- 珍爱生命健康远离传染病威胁小学主题班会课件
- 2025中国稀土集团有限公司社会招聘65人笔试历年典型考点题库附带答案详解
- SMT高级工程师教案 SMT回焊与锡炉相关参数设定
- 事业单位公开选调人员报名表
- 物流运输配送服务合同
- (正式版)FZ∕T 80014-2024 洁净室服装 通 用技术规范
- 《硬措施》解析培训课件-2024年
- 工作资质证明
- 施工电梯垂直度测量记录表
- 数学中考复习-半角模型课件
- 公司领导拜访政府的函
- 国家能源集团电力二十五项重点反事故措施
- 高中物理《静电场》
评论
0/150
提交评论