



版权说明:本文档由用户提供并上传,收益归属内容提供方,若内容存在侵权,请进行举报或认领
文档简介
1、工业遥控系统RF通信协议1 范围本协议约定工业遥控系统RF通信协议,本协议适用于工业遥控系统的射频数据通信。2 规范性引用文件无。3 术语与定义本标准术语定义引用:无。4 网络物理描述本标准物理层描述引用:无。5 符号缩写的含义表 1 符号缩写符号含义符号含义2-FSK2进制频率转换按键ADC模数转换器AFC自动频率补偿AGC自动增益控制 BER位误差率CCA清理信道评估CRC循环冗余检查EIRP等价等方性的辐射功率ESR等价串联阻抗FEC前向误差校正FIFO先进先出堆栈FSK频移键控GFSK高斯整形频率转换键控IF中间频率LBT发送之前侦测LNA低噪声放大器LO局部振荡器LQI链接质量指示器
2、MCU微控制器单元MSK最小化转换按键PA功率放大器PCB印制电路板PD功率降低PQI前导质量指示器PQT前导质量门限RCOSCRC振荡器RF电磁波频率RSSI接收信号长度指示器RX接收,接收模式SAW接口水波SNR信噪比SPI连续外围接口TBD待定义TX发送,发送模式VCO电压控制振荡器WOR电磁波激活,低功率拉电路XOSC石英晶体振荡器XTAL石英晶体6 物理层由于通信接口芯片采用TI公司的数字调制解调电路CC1100,调制方式为2-FSK,数据速率为38400 bps。物理层的帧格式依据CC1100的技术特点而设计。6.1 CC1100物理层基本帧结构图 1 基本帧结构设计采用固定长度的
3、报文,长度为21字节。并由CC1100硬件实现用户数据的循环码校验(CRC16)、交织编码(INTERLEAVING)、前向纠错(FEC)、数据白化(WHITENING),并在白化数据发送前插入前导码(我们编程为4字节),同步码结构(我们编程为4字节)。软件通过编程CC1100控制寄存器,实现功能配置。表 2 CC1100调制码参数配置项目数据内容前导码同步码白化数据(CC1100生成)长度(字节)44M7 链路层7.1 通信匹配地址本系统采用点对点通信方式,只有通信地址匹配的报文才得到处理,通信地址不匹配的报文被丢弃,以确保系统的稳健可靠。对于港口起重等需要双遥控器情况,通过功能码扩展主、从
4、遥控器。系统采用16位二进制匹配地址码,理论上支持65535套遥控系统。7.2 通信连接通信状态维护采用连接方式,除了信道管理相关的数据包外,其他遥控命令数据包的发送前均应检查无线信道连接状态,只有在连接正常的情况下,才启动数据包发送。数据包发送时间分析:4+4+(21+2)*2=54字节,54*8/38.400=11.25ms。 再考虑通信的收发转换、频率校准、接收机的数据处理周期等开销,一问一答的开销约25ms。考虑到系统容余等因素,通信周期可设计为30ms。7.2.1 信道连接的建立遥控器开机后处在接收状态,进行信道统计。信道统计的方法为按信道表依次轮询,读取信道的RSSI值,统计出每个
5、信道上的最大RSSI、最小RSSI,计算出每个信道的RSSI平均值。每个信道的统计时间为T3(信道统计时间)。为确保该信道不被同类设备占用,T3必须大于心跳包发送周期T2。从统计的信道中选取最好的信道进行连接。信道选取过程为:1, 最大RSSI与平均RSSI差值不超过10dBm,且平均RSSI小于-70dBm的信道作为可用信道;统计出可用信道的平均RSSI值作为噪声参考值;2, 在可用信道中选取平均RSSI值最小的信道进行连接;3, 若没有可用信道,则选取所有信道中平均RSSI值最小的信道进行连接,所有信道的平均RSSI值作为噪声参考值。 信道选取完成后,固定在此信道,转换成发送模式,开始发送
6、连接请求,等待T4(等待应答超时),若收到应答数据包,建立连接,开始发送命令。若超时没有收到数据包,则重新发送连接请求。数据包发送采用CSMA/CA机制。若等待信道clear时间超过T7(CCA等待超时),不使用CSMA/CA机制,强行发送。最长发送周期T9= T7+T1+ T4。接收机开机后处于接收状态,按信道表进行周期性查询。接收机信道查询时间T5>3个最长发送周期T9。也就是,接收机轮询到遥控器所在的频率后,最多有3次接收连接请求的机会。若接收到地址码匹配的数据包,建立连接,发送连接应答数据包。连接过程如图2。若遥控器在一个信道上等待的时间T10(信道等待时间)超过1个接收机轮询周
7、期T6,更换信道,在新的信道上等待接收机。各段时间表如表二。表 3 各段时间表1个数据包发送时间T111.25 ms心跳包周期T2200 ms信道统计时间T3210 ms等待应答超时T420 ms接收机信道查询时间T5230 ms接收机轮询周期T6230 ms *总信道数16=3680CCA等待超时T740接收机超时等待时间T8530 ms最长发送周期T971.25 ms信道等待时间T103700 ms图 2 连接请求命令与应答7.2.2 信道连接的维护考虑到无线信道的特点,要求遥控器、接收机分别设置连接状态寄存器及连接超时寄存器,并按如下状态转移模式进行连接维护。连接成功后,遥控器开始发送命
8、令数据包,若命令发出后经过等待应答超时T4没收到应答,则重发命令。重发命令模式与重发连接运行模式类似。若一个命令数据包重复发送3次后仍没收到应答包,则认为连接丢失,更换信道,在新的信道等待接收机。接收机若超时没收到遥控器的命令数据包,则认为连接丢失,继续按信道表查询。超时等待时间T8>4*最长发送周期T9。信道维护流程图如图4。图 3 连接后的信道维护7.2.3 跳频若遥控器在一个信道上的等待时间超过T10未收到应答,或者连接上后重发次数已满还未收到应答,此时需要进行跳频。跳频的过程为:1, 再次统计当前信道的RSSI,若RSSI满足可用信道条件,且平均RSSI小于RSSI参考值,则继续
9、停留在该信道发送连接报文,等待接收机2, 如果当前信道不满足可用信道条件,则依次跳到下一个信道进行统计。直到找到一个满足条件的信道。3, 若没有满足条件的信道,则使用所有信道中平均RSSI值最小的信道进行通信7.3 数据发送模式数据的发送采用CSMA/CS机制和应答机制。1, CSMA/CS机制考虑到在系统附近范围内可能存在多个同类系统,并且与这些系统存在使用相同信道的可能,有必要采用CSMA/CA(Carrier Sense Multiple Access with Collision Avoidance)机制来防止冲突发生和解决冲突问题。在802.11(主要应用于无线局域网)和802.15
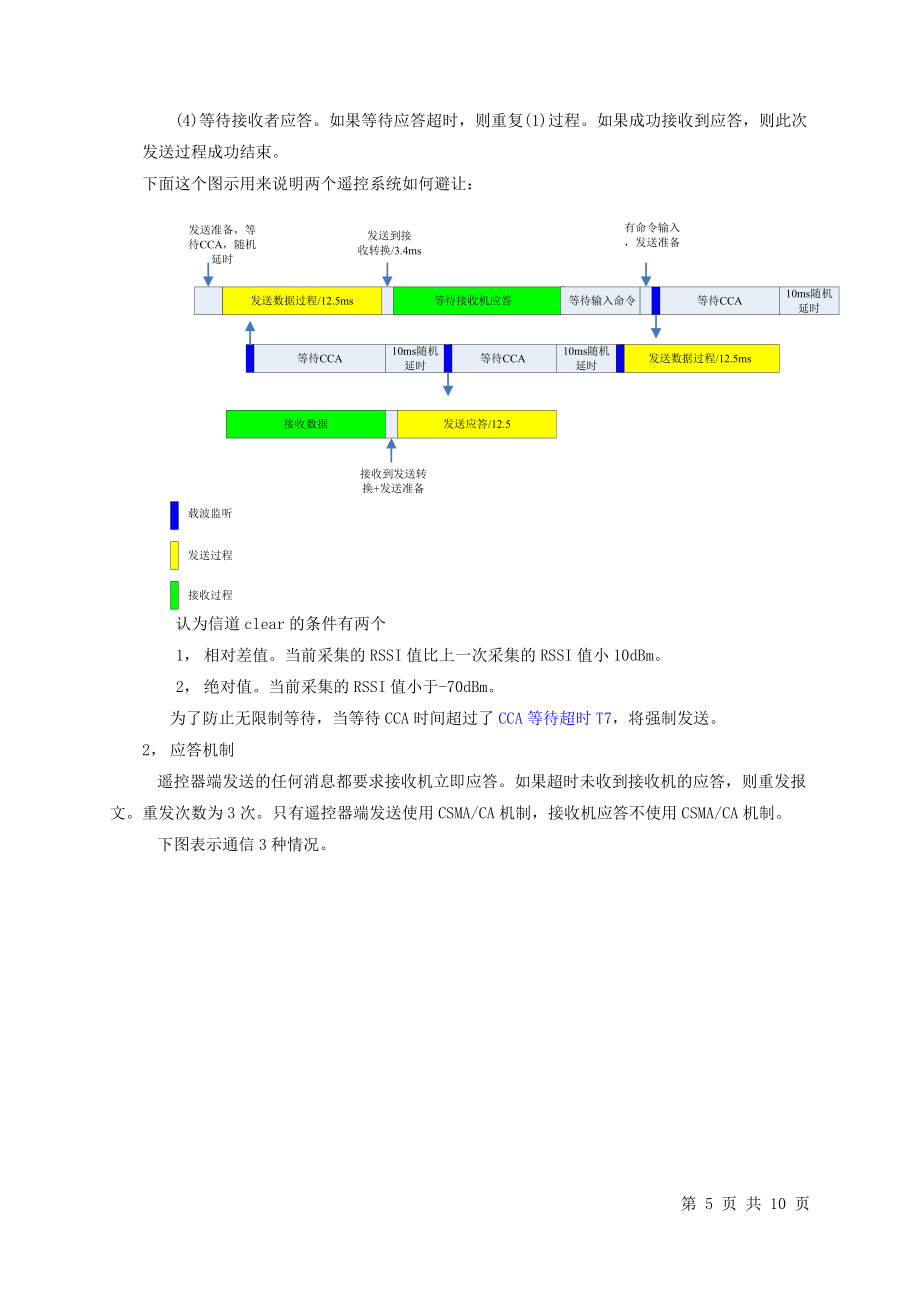
10、.4(主要应用于Zigbee)中,都采取了CSMA/CA机制。这种机制在一些点到点的无线通信中也比较常见。其过程是:(1)数据发送就绪时,先检查信道是否被占用。(2)如果信道被占用,则等到介质空闲后,再随机退避一段时间,重复(1)过程。(3)发送数据。(4)等待接收者应答。如果等待应答超时,则重复(1)过程。如果成功接收到应答,则此次发送过程成功结束。下面这个图示用来说明两个遥控系统如何避让:认为信道clear的条件有两个1, 相对差值。当前采集的RSSI值比上一次采集的RSSI值小10dBm。2, 绝对值。当前采集的RSSI值小于-70dBm。为了防止无限制等待,当等待CCA时间超过了CCA
11、等待超时T7,将强制发送。2, 应答机制遥控器端发送的任何消息都要求接收机立即应答。如果超时未收到接收机的应答,则重发报文。重发次数为3次。只有遥控器端发送使用CSMA/CA机制,接收机应答不使用CSMA/CA机制。下图表示通信3种情况。7.4 通信包结构设备链路层实现数据包封装与数据发送,我们定义CC1100进行CRC16计算前的数据为链路层数据,链路数据由应用层数据打包得到。表 4 链路层帧结构项目数据内容地址码功能码报文长度命令编号应用层数据XOR校验数据长度(字节)3111N=141地址码:用于遥控器与接收机配对,配对码错误,后续报文自动丢弃。功能码:用来描述数据包的功能用途。报文长度
12、:是指“应用层数据”的长度,固定长度为14,小于255。保留该字节是为了链路层的媒介无关的特性。命令编号:为了防止遥控器重发命令时,接收机重复执行命令。当遥控器收到正确回应命令编号加1,如果接收机收到命令编号与前一次的相同,则不执行该命令。应用层数据:等待输的应用层数据,直接表达应用层的要求。XOR校验:“地址码、功能码、报文长度、应用层数据”的所有字节的异或值,长度为1个字节。链路层的数据包总长度为21字节。 8 应用层帧格式工业遥控系统支持报文类型参见下表。表 5 报文类型表序号报文类型应用层功能报文长度说明1A0遥控器发起:通信连接固定长度为142A1接收机应答:通信连接固定长度为143
13、A2遥控器发起:遥控命令固定长度为144A3接收机应答:遥控命令固定长度为145A4遥控器发起:心跳包固定长度为146A5接收机应答:心跳包固定长度为147A6遥控器发起:PWM电流调节固定长度为148A7接收机应答:PWM电流调节固定长度为149保留不用10保留不用11AA保留不用12AB保留不用13AC遥控器请求:对时命令14AD接收机应答:对时命令15AE保留不用16AF保留不用表 6 请求通信连接:A0字节序号报文内容数据格式用途1T_CH遥控器的信道号2T_LINK_ST 遥控器连接状态字节,待补充,默认为0X00。3T_STATUS遥控器状态字节,待补充,默认为0X00。4Year
14、时间5Month6Day7hour8Minute9Second1011121314T_VERSION遥控器系统版本号。默认为0X01。表 7 应答通信连接:A1字节序号报文内容数据格式用途1R_CH接收机的信道号2R_LQI_AV信道质量接收机通讯时LQI平均值3R_RSSI_MS信号强度接收机通讯时RSSI4R_RSSI_MIN接收机无通讯时RSSI最小值5R_RSSI_MAX接收机无通讯时RSSI最大值6R_RSSI_AV接收机无通讯时RSSI平均值7R_STATUSD7:=1 ARM自检故障D7:=0 ARM自检正常D6:=1 DSP自检故障D6:=0 DSP自检正常D5:=1 电源自检
15、故障D5:=0电源自检正常D4:=1 急停自检故障D4:=0电源自检正常D3:=1D3:=0D2:=1D2:=0D1:=1D1:=0D0:=1D0:=0接收机状态字节,待补充,默认为0X00。891011121314R_VERSION接收机系统版本号。默认为0X01。表 8 遥控命令 A2字节序号报文内容数据格式用途1ANALOG0摇杆0数据,用于控制臂架旋转。2ANALOG1摇杆1数据,用于控制一节臂上下运动。3ANALOG2摇杆2数据,用于控制二节臂上下运动。4ANALOG3摇杆3数据,用于控制三节臂上下运动。5ANALOG4摇杆4数据,用于控制四节臂上下运动。6ANALOG5摇杆5数据,
16、用于控制五节臂上下运动。7ANALOG6备用模拟量。8ANALOG7排量数据9ANA_DIR0D7:摇杆7正向开关状态。D6:摇杆7反向开关状态。D5:摇杆6正向开关状态。D4:摇杆6反向开关状态。D3:摇杆5正向开关状态。D2:摇杆5反向开关状态。D1:摇杆4正向开关状态。D0:摇杆4反向开关状态。摇杆方向信息字节0,用于控制臂架正反运动方向。顺时针方向为正向;逆时针方向为反向。向上为正向;向下为反向。1,表示对应位开关闭合。0,表示对应位开关打开。10ANA_DIR1D7:摇杆3正向开关状态。D6:摇杆3反向开关状态。D5:摇杆2正向开关状态。D4:摇杆2反向开关状态。D3:摇杆1正向开关
17、状态。D2:摇杆1反向开关状态。D1:摇杆0正向开关状态。D0:摇杆0反向开关状态。摇杆方向信息字节1,用于控制臂架正反运动方向。11SW_STATUS0D7:泵送启动开关D6:泵送停止开关D5:正泵开关。D4:反泵开关D3:快速泵送开关D2:慢速泵送开关D1:发动机转速加 D0:发动机转速减开关量当前状态字节0。1,表示对应位开关闭合。0,表示对应位开关打开。12SW_STATUS1D7:电笛开关D6:发动机熄火开关D5:遥控器电池状态 D4:遥控器开关机D3: D2:D1:D0:开关量当前状态字节1D5=1,电池低电压,遥控器即将进入待机状态,命令接收机关闭所有输出;D5=0,电池正常。D
18、4=1,遥控器已关机,接收机断开连接,关闭所有输出;D4=0,遥控器开机13SW_CHG0D7: 0D6:摇杆5 D5:摇杆4 D4:摇杆3 D3:摇杆2 D2:摇杆1 D1:摇杆0D0:排量变位状态字节1。值为1时表示该开关量或模拟量有变化。未定义数据位为备用数据,要求发送方强制设置为0。14SW_CHG1D7:泵送开关D6:正/反泵开关D5:快/慢速泵送开关D4:发动机转速加/减 D3:电笛开关D2:发动机熄火开关D1:遥控器电池状态D0:急停开关量变位状态字节0。值为1时表示该开关量有变化。表 9 应答遥控命令 A3字节序号报文内容数据格式用途1R_CH接收机的信道号2R_LQI_AV接收机通讯时LQI平均值3R_RSSI_MS接收机通讯时RSSI4R_RSSI_MIN接收机无通讯时RSSI最小值5R_RSSI_MAX接收机无通讯时RSSI最大值6R_RSSI_AV接收机无通讯时RSSI平均值7R_STATUSD7:=1 ARM自检
温馨提示
- 1. 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
- 2. 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
- 3. 本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
- 4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
- 5. 人人文库网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
- 6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
- 7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
最新文档
- 2025农业银行甘孜分行春招职位笔试历年典型考题及考点剖析附带答案详解2套
- 2025内蒙古鄂尔多斯达拉特旗智杰教育投资有限责任公司面向社会招聘劳务服务人员60人笔试历年备考题库附带答案详解
- 智能家居生产基地项目使用林地可行性报告
- 2025内蒙古呼伦贝尔市阿荣旗旗属国有企业招聘笔试历年典型考点题库附带答案详解
- 2025兴业银行兴业数字金融服务社会招聘笔试历年典型考题及考点剖析附带答案详解
- 2025交通银行潍坊分行校园招聘及笔试历年典型考题及考点剖析附带答案详解2套
- 机械磨削加工精度提升方案
- 停车场改建工程交通影响评价
- 企业资金风险防控方案
- 企业演讲表达训练方案
- 2026年第25个全国安全生产月专题课件
- 2026年陕西黄河壶口文化旅游发展有限责任公司招聘(4人)笔试参考题库及答案详解
- 2025-2026学年北师大版六年级语文毕业会考模拟试卷(含参考答案解析与作文范文)第100套
- 2026兰州城市学院招聘事业编制专职辅导员10人笔试模拟试题及答案详解
- 2026江苏宿迁经开区古楚街道城管辅助人员招聘4人笔试模拟试题及答案详解
- 2026苏教版小学三年级科学下册期末模拟测试卷及答案(三套)
- 吉星义齿加工管理软件操作说明书
- 西藏2026乡村振兴专干招聘考试笔试题含本地三农政策
- 财政系统干部专业基本能力测试练习竞赛试题及答案
- 2025 年湖北省中考生物地理试卷
- T-CECS120-2021套接紧定式钢导管施工及验收规程
评论
0/150
提交评论