



版权说明:本文档由用户提供并上传,收益归属内容提供方,若内容存在侵权,请进行举报或认领
文档简介
1、HCD库的使用1. 前言HCD(Hydraulic Compo nent Desig n)含义是液压元件设计。HCD库可以由非常 基本的模块,建造出任一元件的子模型。HCD大大增强了 AMESim的功能。在使 用HCD之前最好能够熟悉其他AMESim标准子模型。下面将提到建立该库的主要性,之后时是关于使用HCD的五个例子,最后给 出了一些总体规则,以便更有效的使用 HCD。前四个例子针对 绝对运动,也是HCD应用的重点。第五个例子是针对 相对运 动。推荐重复练习前四个例子。使用AMESim,可由库中元件构建一个机械系统的模型。起初, AMESim用 于这些元件的符号标记是给予基本的表示方法(例
2、如液压元件的 ISO标记)。对 于某一领域工程师,这里存在两个问题:元件的差异技术的差异元件的差异问题可以表述为:无论有多少元件,都是不够的 。例如一个液压 千斤顶,有以下的可能:有一个或两个液压腔;有一个或两个活塞杆;有一个,两个或零个弹簧。这样一共就有 12个组合,每个都需要一个单独的标记,而每个标记都必须至 少对应一个子模型。对多数 AMISim 标记来说,一个子模型就足够了。在这种情 况下,就需要 12个子模型。如果考虑到伸缩式千斤顶,模型数量将会翻倍。有时 还需要在端口进行不同设置,以得到不同结果,这就需要数量更大的模型。在标准AMESim库中,不可能提供如此大量的标记和相应的子模型
3、。因此只 提供力一些比较通用的元件标记和子模型。当然,AMESim的专家用户可以通过 AMESet来添加新的标记和新的子模型。第二个问题,在AMESim中,要构建好的元件子模型需要什么技术或其他的 软件。列表如下:懂得构建和操作该元件;清楚元件运作时的物理变化;给物理量制定数学运算法则,以便子模型由输入量得到输出量; 可将运算法则编译成可执行代码。 除此之外,还要对子模型进行测试、纠错和修正。这就意味着子模型的开发 需要在机械、物理、数学和计算机科学方面的综合能力。这就是技术上的问题。 同时具有这些技术的人寥寥可数,因此构建优良子模型的任务时专家级别的工 作。HCD的开发就可以解决这些问题。上
4、面提到了,传统AMESim库使用的模型使用 的是标准ISO标记。这些标记是将模型细分成子模型。很显然这个细分不是唯一 的,也不是最佳的方法。可以将细分应用于更大或更小的单元。HCD使用细分可以由最少的子模型创建出最多种的机械系统的模型。回到液压千斤顶的那个例子,可以发现所有建立起来的组合都是由下列元素组成的:压力作用下的液压流体;环状变化的容积腔;机械弹簧;由微元压力和面积产生的力推动的活塞 。这才是对细分较好的利用,可以与基于ISO标准模型下的细分组合,很明显, 基本模块少很多。因为每个单元都是工程中的实体,可以将其称之为技术单元。 可以在商店买到相应的物理部件,组装成想要的元件。购物清单:
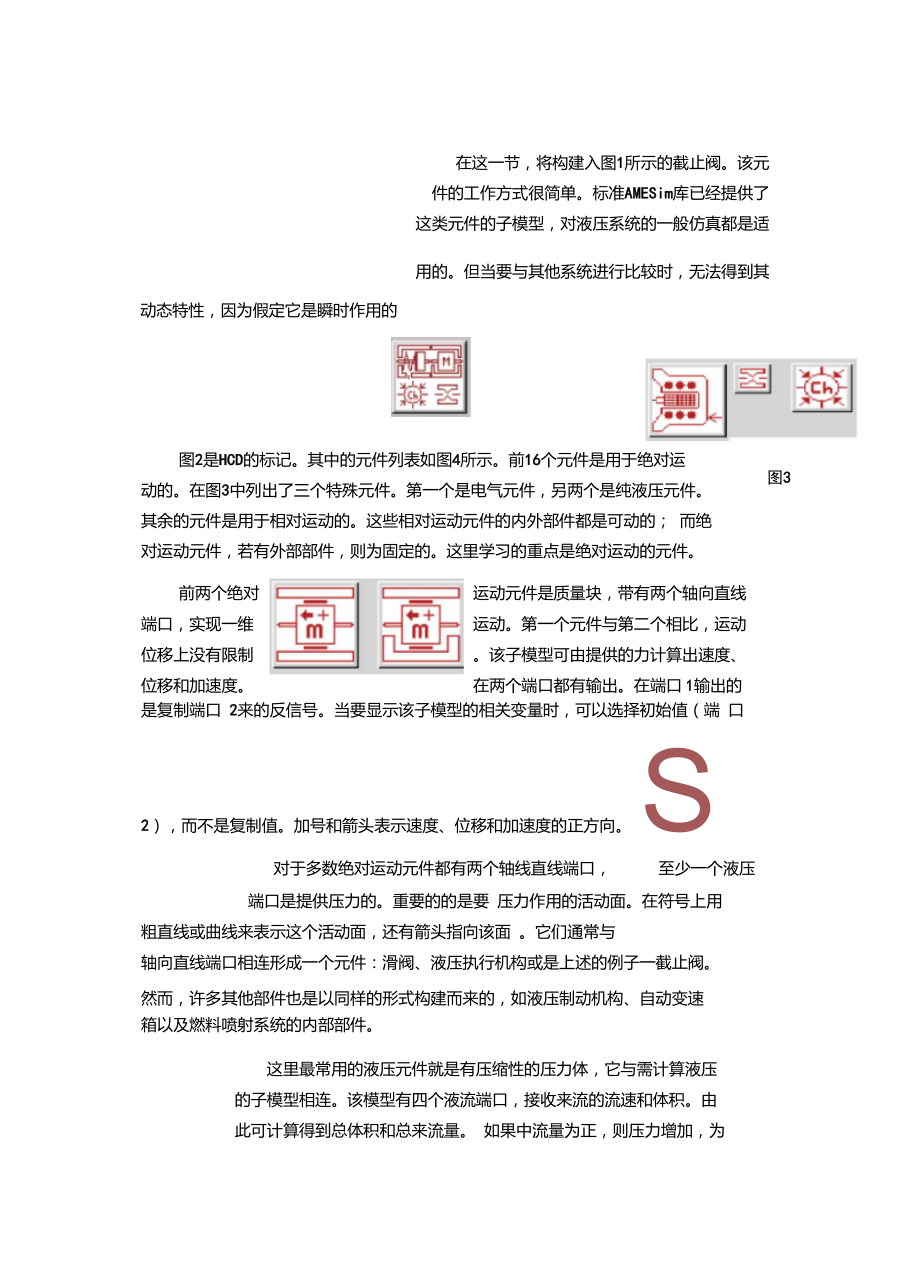
5、1 活塞2 环形可变缸3 机械弹簧4 液压油在第2章中将继续介绍这个例子,还有一系列的例子可以逐步介绍HCD的功用。2. 实例指南2.1.利用HCD构造截止阀在这一节,将构建入图1所示的截止阀。该元 件的工作方式很简单。标准AMESim库已经提供了 这类元件的子模型,对液压系统的一般仿真都是适用的。但当要与其他系统进行比较时,无法得到其动态特性,因为假定它是瞬时作用的图3图2是HCD的标记。其中的元件列表如图4所示。前16个元件是用于绝对运 动的。在图3中列出了三个特殊元件。第一个是电气元件,另两个是纯液压元件。 其余的元件是用于相对运动的。这些相对运动元件的内外部件都是可动的; 而绝 对运动
6、元件,若有外部部件,则为固定的。这里学习的重点是绝对运动的元件。前两个绝对运动元件是质量块,带有两个轴向直线 端口,实现一维运动。第一个元件与第二个相比,运动 位移上没有限制。该子模型可由提供的力计算出速度、 位移和加速度。在两个端口都有输出。在端口1输出的是复制端口 2来的反信号。当要显示该子模型的相关变量时,可以选择初始值(端 口 2),而不是复制值。加号和箭头表示速度、位移和加速度的正方向。 S对于多数绝对运动元件都有两个轴线直线端口,至少一个液压端口是提供压力的。重要的的是要 压力作用的活动面。在符号上用 粗直线或曲线来表示这个活动面,还有箭头指向该面 。它们通常与 轴向直线端口相连形
7、成一个元件:滑阀、液压执行机构或是上述的例子一截止阀。然而,许多其他部件也是以同样的形式构建而来的,如液压制动机构、自动变速 箱以及燃料喷射系统的内部部件。这里最常用的液压元件就是有压缩性的压力体,它与需计算液压 的子模型相连。该模型有四个液流端口,接收来流的流速和体积。由 此可计算得到总体积和总来流量。 如果中流量为正,则压力增加,为负,贝U压力降低最简单的截止阀中,阀球在一个限定位移内自由移动。在一个极限位置,阀门是全关的,在另一个极限位置则是全开的。 为了平衡,阀球的位置取决于作用 在液压端口的压力。图4HCD包含两个液压流道中为阀芯为球形的元件, 个是放置于平面圆上,另一个则是放置在锥
8、形斜面上 放置于平面上的子模型如图5:有两个液压流动端口,作用在两端口上的压力作为输入量;如果阀球在右极限位置,则流道是完全关闭的;如果阀球在左极限位置,则流动是完全打开的;与阀球相连的杆在该模型中直径默认为 0。阀球受到压力作用,失去平衡,开始移动,表 明这里需要引入阀球的惯量。由于在截止阀中阀球 的运动是有限制的,所以要选择图中右侧的子模 型,其外部变量的详细内容如图6所示。BAP21b3ii poppet with sharp edge set材 心诫Qf网曲l? dcon旳讥起涵已祜伽应歸熔蟆斟畑屋g jwiwL/min cm"w3 bar L7min cm1 brCloe图
9、5图7给出系统的两种可能形式。每个系统都包括截止阀和两个压力源,以便 对其进行简单测试。存在两种形式的原因很简单:为了让HCD的使用尽可能的简单,许多HCD的标记都对应两个子模型。回看图5中BAP21子模型的外部变量, 可见BAP22的外部变量就是其镜像。所以这两个系统得到的结果是一样的, 但为 了让例子简化,按照图7(a)的系统进行构建。注意:零力源(F000)连接到自由机械端口。在子模型类型的选择上,使用第一个子模型(Premier Submode)是较为简 便的。然而,如果要手动设置惯量,就要注意两种模型可能在位移限制上的不同, 通常是与其是否具有终点挡板有关。在处理终点挡板处的接触时有
10、种不同方法:BAP22|FOOOBAI21PS 00PSOOIBAP21(a)(b)理想无弹性碰撞,速度瞬时降到0;机械弹簧阻尼器。这两种形式都有可用之处,第二种方法需要设置弹簧和阻尼器的阻尼率。BAI21采取的是第一种处理方法。BAI21中参数,质量设为10g,位移下限设为Omm,位移上限设为4mm。子 模型需计算质量力,因此还有个角度有设置。而在本例中,相对于压力,质量力 可以忽略,所以对角度的设置是无关紧要的。 这里有必要适当的设置一下动摩擦 (库仑摩擦)和静摩擦。非零的粘性摩擦可以让该单元更稳定,但实际情况中, 阀门通常是在全开或全关的状态。所以这里把粘性摩擦设为0。在HCD库中引入其
11、他与摩擦相关的参量是为了实现静摩擦到动摩擦更为平滑的过渡。通常这些量都可以保留其默认值,若这里将动摩擦和静摩擦都设为0,那么这些量在任何情况下都不起作用。在BAP22子模型中,两个杆的直径都要设为0。最大流量系数(maximum flow rate coefficient)不要远离默认值0.7。临界流量数(critical flow number)可以控 制达到这个系数的快慢,通常也是保留其默认值。在阀球上的总作用力就是作用 其上的所有压力,也就是外部力,如图7( a),假定右边的压力作用在与孔口相 邻的面积上,左边的压力作用在阀球的剩余面积上。这种假定在多数情况下都可 得到满意的结果,但这里
12、预备了一个修正条件:喷射力(jet force)。这是个驱 使球阀关闭的力。用一个系数喷射力系数来决定考虑这个修正。默认为0,不考虑此条件,设置为1即考虑该修正。可通过实验数据设置成其他的值,以得 到符合要求的子模型。将左边的压力源设为定值50bar。右边的压力源在1秒内由0bar升至100bar, 再在1秒内降至0bar,进行一个2秒的仿真,设置间隔为0.01秒。图8绘制了通过截 止阀流量随差压的变化,这是个动态子模型,所以当差压为负时,流量也不为0。 尽管压力下降的稳态特性使阀门关闭,但惯量引起的阀球在离开稳态位置后的滞 后导致了反向的流动。在阀门打开时也是同样的原因,使末尾的曲线不一样。
13、为得到稳态特性,要让压力变化的更加缓慢,增加仿真时间。注意到球阀子模型还计算了在两个流动端口处外部变量中的体积,这些量将对液压千斤顶之后的一些部件起到重要作用。接下来,在截止阀中加入一个弹簧(SPR0),将其变换成为弹簧阀。修改后 的系统如图9所示。在弹簧的另一端附上一个固定的零速度源( V000)。100-11 - EAP22*1 fie 脚 rte port 1 0_/mnec-goJ-4020-0 二加一60I4040630differenHal pressure barIEU图8需要注意:弹簧始终处于被压缩状态。依旧有两种方式来构建这个阀,如图 9中(a)(b)所示。惯性力作用在球 阀
14、的哪一面都可以。然而,弹簧必须在左侧,否则它会要将阀门打开而不是关闭。弹簧在两个端口都有一个作用力,所以左边的弹簧端口必须用一个零速度源 关闭而不是零力源。BAP21PSOOSPROOl 1 己SPROOIBA121(a)(b)调整弹簧刚度和预载荷以得到所期望的特性。通过对这些值的适当选择,可 以设置一个开启压力和一个流量压力特性。在质量块子模型BAI21中计算得出基本位移和相应的速度。如图5和图6所示,这些值通过子模型 BAI21。图10示意出弹簧子模型的外部变量。SPR00接收来自BAI21的速度和另一个来自V000的速度(该速度通常为0)图10亍尸Tit!苦VNue Unitcurren
15、t spring length 0.999 msp(ng rate10000 N 7mfree length oi spring1m图11当给弹簧设置参数的时,要尽可能给截止阀一个小的预载荷,以确定其开启 压力。在图11中给出的是10N。采用与前一个例子相同的压力源,运行仿真。图12是截止阀在开启压力约为5bar的情况下的流量一压力特性曲线。在压力约为22bar时出现的斜率的变化 是由于球阀到达它的行进极限。图13显示了球阀的速度,注意在阀门部分开启时出现了不稳定的现象(最好将间隔时间降至0.001秒,会显示的更清楚),可通过增加阻尼孔口来解决这个问题。这个办法就是第三个例子。1 -RAP22
16、-1 flow rate pot 1 Ukrandiffenntial pessure bar图12图13作为练习,可按图14形式改变截止阀。这个阀将受到来自两个系统的压力, 它将连接提供压力较大的那个系统。在中心的两个端口实际起作用的只有一个。 确保连接球阀到节点的两条管路都被设置为直接连接(DIRECT )。阀建好后进行测试。两个压力源是供给系统,还有一个流量源。10秒内流量源流量从0变化到10L/min,左压力源从0 bar到100bar,右压力源从100 bar到Obar。为了使两球阀都可运动,还必须设置左球阀相对零位移的位移(lift )。质量块终点挡板的下限值为 0, 上限设为0.
17、005m.。对右球阀,将其相应于0位移的开度设为0,左球阀开度设为5mm。运行仿真(10秒),绘制 +dLE1 BAP22-2 flow rate port 1 L/min610r10028l20n 1业 80; 604020-i图1424 Trnels81 - H3NODE3 1 iunction pcessure bar同通过每个球阀的流量和输出压力。24 Trnels)81 - BAP21 *2 How rate port 1 L/mr1.1.利用HCD构建液压缸图15这一节,介绍液压缸的构建方法,其简图如图15 (a)所示。包含质量的液压缸模型是AMESim中带有的基本模型。利用 HC
18、D最简单的构建形式如图15(b)所示。同时构建如图16的系统。以便对使用 HCD和AMESim基本库进行比较。注意这里惯性力的标记被镜像了。这里给出的位移常规符号与标准液压缸子模型 HJOOO中的一致。尽量自动选用第一个子模型。选择带有理想(刚性)终点挡板 的质量块模型。在参数方式(Parameters mode中对两个系统的参数进行设置, 使其尽可能的相同。这点需要特别注意。LJFigure 16子模型BAP11和BAP12非别代表活塞及其两侧的腔室,而这里不是两个活塞,而是一个。在活塞两侧的每个子模型都和压力源相连,箭头和粗直线表示了压力的作用面。注意质量块子模型可以放置在左侧也可在两个半
19、活塞之间。左侧子模型的活塞杆直径要设为0,而这两个模型的活塞直径都要设为 25m m,做到 和标准HJ000的参数一致。右侧模型活塞杆直径要设为12mm。这时不用设置零 位移时的腔长度这个参数,接下来要返回设置该值。注意到在用HCD子模型时,以下几个特征非常实用:全局参数复制参数普通参数活塞直径可用全局参数来命名为 pdia,设为25mm,手动设置后即可拷贝到 另一个子模型中。当然可简单的将其设为普通参数。在HJOOO中,默认的行程时0.3m,默认的质量是1000kg。因此这里带终点 挡板的质量块要把质量相应设为 1000kg,行程下限为0m,上限为0.3m。箭头和 加号表示位移为0时,质量块
20、在左边活塞的极限位置。因为 HJ000中初始位移 值就时0,活塞处于左位,所以相应在 BAI2 1中将初始位移设为0m。将提供的 压力设为100bar,相应的信号输入频率设为1Hz,然后执行仿真。图17是位移 的仿真结果。为何结果稍有不同?原因很简单,在下面的系统(图16 (b)是个阀和缸 的直接(直接连接)子模型。即不存在动态效应,也就是说阀门直接作用在液压 缸,压力的动态特性仅仅是由液压缸内的液容引起的,这个容积是随着活塞的位置变化而变化的。与之相比,其上方的系统(图 16( a),在液压缸内没有这 部分液容,但HJ000中的阀缸之间存在液压管道。压力的动特性是由管道中的1 - BA121
21、-1 disphcement port 2 m2 亠 HJ0001 rod displacement |m|0051 52图17固定液容引起的将这部分变化的液容加入液压缸也很简单,改进的系统如图20所示这里的关键部件是与两个“半活塞”相连的液压腔(ch),相对 应的子模型是BHC11,用于模拟压力的动特性。这个子模型有 4个 端口,每个的输入都是流量(L/min)和体积量(cm*3 )。子模型对4个体积量求和,再加上一个死体;同时对流量求和。由这些值即可计算出其 派生压力。该模型用于包含一些独立液容的复杂仿真, 也可用于模拟泄漏流。本 例中,只需要两个端口,另两个可以连接分别连接零流量源和零体
22、积源,如图18所示。注意液压管道不是直接连到液容,而是在中间连接了两个如图19所示的液压节点,有时这样的连接出现在 BHC11与其他子模型之间,是用于供给流 量,而不是体积量。<9图10更改后的系统如图20所示。在BHC11中将死体设为50m3,使之与HJOOO 设置一致。当质量块的位移是0时,活塞处在左极限位置,这就意味着右液压腔的长度 时0.3m,左腔的长度为0。因此将BAP11在零位移处的腔长参数设为 300mm, 相应的BAP12设为0。为何这里长度有两种单位m和mm,是由于HCD子模型不仅用于液压缸的 仿真,还有各种阀门的仿真,对于通常 m作为长度单位都太大,而 mm则比较 合
23、适。对质量块子模型,用 m做单位,是为了跟标准 AMESim子模型相对应。图21是分别用HCD和HJ000建模得到的位移的比较。可见两种方法已经得到了相同的结果。图22显示了 CH中的体积变化1 - BiJ21 -2 3spiacerni5nl pmt 2 |m_2 HJDIU od elHjlaLehia i mllime t图211-EHC11-' volume of hydraulic chamber cn""32 -EHC11-2 volume of hydraulic chamber cmS門-一一一十一 2 1心1-2te在上面HCD构造的模型中,没考虑
24、经过活塞的泄漏。这一点,可以在两个 “半活塞”之间加入一个泄漏模块即可,如图23所示。相对应的子模型是BAF11 (其镜像是BAF12),计算的泄漏流量就是端口 1, 2的输出,提供一个体积量, 而这个体积通常为0。也就是说这些端口可以连接到 BHC11子模型上。泄流量是根据活塞直径、缝隙、活塞长度和速度计算而来的。粘性摩擦也随 之计算出来图23图24现在考虑如图24的情况。在标准AMESim库中不包括这个系统。构建后的 形式如图25。对于HCD子模型来说,很容易看出基于系统进行的假定。在图 25中,很明 显压力动特性包含了泄漏和终点挡板的阻尼。而在图 24中就不能清楚了解这些 内容。图252
25、.3构建伺服阀Ppre$ureL27图0Supply preute图28这里要构建如图26所示,有特殊压力需求的阀。输入压力为 P和输出载荷 为Ao输出端压力又作为阀的驱动压力。构建该模型主要是想要在输出端能够维 持一个预定的压力。弹簧力用来维持阀门的打开状态,而驱动压力则使之有关闭 的趋势。若负载压力低,弹簧力将阀门打开,流量增加;若负载压力高,则阀门 会部分或全关。后接油箱回收排油。图27该系统的示意图。图28是用HCD元件构建的系统简图。注意: 液压腔动态特性通过使用管道子模型 HLOOO来进行模拟; 不考虑泄漏;输出端A需要进行稳定化处理或设置阻尼孔口,否则工作不理想; 有压力作用在活
26、塞上的三个圆形或环形面上,与弹簧力同向或反向图29是在28模型的基础上稍加改进的系统。管道子模型 HLOOO用压缩性 元件BHC1 1代替。需要重点指出的是,容积变化由液压腔传递到子模型 BHC11。 与图28相比,在孔口和驱动端口之间的管道 HLOOO中,加入了一个普通节流孔 口,意味着用一个固定容积来代替驱动压力腔的变化容积。因此会有所不同,但可通过设置HLOOO的参数,使之与驱动压力腔容积一致,结果就非常接近。在图29中,需用一两端口液压节点来连接标准液压元件:可变孔口和HCD子模型:液压腔Ch,原因是标准AMESim子模型只能提供流量。阻尼孔口相对应的子模型是 HCD中的BHO11,与
27、OROOO不同的是,它每 个端口都是O体积、O流量输出。还可进行其他改进变化,例如加入质量引起的动态特性,但这不会导致结果的变化。还有基于不同假设的其他改变,可能会导致结果明显的变化。在图28中,使用两压缩性管道(HLOOO),而驱动腔的体积内未考虑压缩性影响。图29还考虑到左(阻尼)和输入端之间的泄漏。就相当于给阻尼孔口附加 一并行孔口。哪种假设更好?如果驱动腔体积相比管道的来说很小,就没有必要在两者之间加以限制,图28所示的系统就已足够。但如果阻尼孔直接连到驱动腔上或是腔容积随阀芯位移而变化,就要考虑用图 29所示的系统会更好。然而,用HCD 建模是可以测试出不同假设条件下的连接的效果,并
28、对结果进行比较。图30图30给出了建立弹性腔的另一种方法,图 28和图29更接近于带排油箱的 自然情形,然而进一步检查发现,没有泄漏,加入一个泄漏量很简单,但可能这 个量非常小。也就是说位移的不同就是在腔的弹性上,图30的压力始终为0,而图28和29中的压力只有当油箱的压力为 0时才为0。构建如图29的系统,并采用第一个模型作为首选。在参数形式工作状态下, 分别给两个孔口设置给定直径。可变孔口的最大直径设为8mm(不要忘了设置整数参数以便能够指定该孔口直径特征值)。将阻尼孔口的直径设为0.5mm。与 可变孔口相连的信号源,前5秒信号值由0到1线性增加,后5秒由1到0线性 减小。这样模拟出一个变
29、化的负载周期。子模型BAP12和BAO011的默认活塞/阀芯直径设为10mm。BAO011和中 间的BAP12子模型的活塞杆直径设为 4mm,另外一个BAP12和BAP16的活塞 杆直径设为0mm。这样就确保了中间腔的压力平衡,而左腔压力与弹簧力反向。 对于BAF11泄漏模型,其直径和接触长度设为 10mm。可用全局变量来进行设BAI21的质量设为0.03kg,粘性摩擦设为10N/(m/s),位移下限设为0m,上 限设为0.0007m,初始位移(端口 2位移)设为0.0007m。当位移为0时,阀芯 在左极限位置,也就是阀门全开,BAO011相对于零位移的开口量(underlap) 应为0。BA
30、P16的弹簧刚度和预加载荷要能提供阀门保持原位的载荷压力,而位移要和质量块模型BAI21相对应。当位移为0时,阀芯处于左极限位置,所以弹簧 在位移为0时处于最大拉伸长度状态,将此时的弹簧力设为 200N,弹簧刚度设 为10N/mm。此时驱动腔的长度达到最大,设为 40mm,该数值可用来计算腔容积。然而,没考虑压力的动态特性,除 BAP12以外的其他子模型的相关参数保1 -佢归m留默认值即可,而BAP12则要给液压腔子模型提供一定的体积量。当位移为0时,腔长为最小,输入量为 0。可以通过设定子模型 BHC11中死体体积来增大 这个输入。将控制腔(左BHC11)死体体积设为2cm3,输出腔(右BH
31、C11 )死 体体积设为100cm3。供给压力设为100bar,定常。运行仿真10s。图31显示了负载压力的变化。 可以看出系统大致维持25bar的压力,而在5s附近的压力发生了变化,可以在 位移图中发现这是阀门全开的时刻。 可见是某些参数影响了系统的稳定性。 可将 阻尼孔口直径设为1mm,再来显示负载压力和阀芯位移的图形。可以发现系统 变的不稳定。再将此值改为0.8mm查看结果。最后说明,在驱动腔内或是在HL000 管道内一个很小的体积都可使系统趋于不稳定。2.4三位三通换向阀图32这一节要构建的是一个方向控制阀。图 32是一个三位三通阀。在没有任何 驱动力的情况下,该阀是在弹簧力作用下处于
32、中间位置的。若阀芯向左移动,贝U提供的压力P将连接到端口 A ;若阀芯向右移动,贝U A连接到油箱T。如果阀 芯很轻,一个很小的力就可以使其左右移动,这样的阀总是趋于全开或全关的。 而当弹簧力很大时,就需要比单克服阀门惯性力大得多的力才能使阀门全开。倘若稳定,阀门就将处在中间位置,既不使全开也不是全关。图32没有详细的表示出这些内容。系统可以是手动,也可能是电动或是液 压驱动。弹性液容要通过阻尼孔口连接到中心腔,得到稳定的系统。图33就是用HCD元件构建的一个简单机械驱动的换向阀图33阀芯质量的子模型被放置在中间;两个弹性/活塞子模型于中心腔相连,左边一个通过一个阻尼孔口 连接;其中一个液压腔
33、(Ch)有5路的流量/体积的输入,因此需要一个节点;通过可变孔口的形式表示一个典型的负载;用一个简单的压力源来提供压力;用一个力源来模拟手动作用。连接系统,仍然是选择各子模型的第一个参数。所有的活塞/阀芯直径和活塞 杆直径都保留其默认值,恰好和本例相符。质量块模型BAI21的质量设为50g,位移的上下限分别为0.002m和-0.002m,即总行程为4mm,中间位置的位移为0。 按照图34对BAP16的参数进行设置。BAO11子模型的腔长设为20mm。将可 变孔口直径设为4mm以确定相应的载荷。确保于 该孔口相连信号源的信号值是 常量1。将阻尼孔口直径设为0.8mm。按照图35对驱动力进行周期性
34、设置。压 力源提供150bar的常压。TitleValueUnitrxiex of hidraUic fUd0rxiex of hidraUic fUd0phton diameter10 mmrod diarnetei5rnmspring stiffness50N/mmspring force at zero displa匚亡20 N chamber length at zero dr$placefrient20 mm图34TideValueUnithme at which duty cycle startsOsoutput at start ol stage 1Ondll匚at end of
35、 stage 1OniJIduration 口f stage 11soutput at strt of Mage 2OnUIoutput at end ot2250 nUIduration of stage 22soutpul 孤 如t of3250 ndloutput at end of3250 nullduration of stage 34soutput at art of ?tage 4”250 nUHoutput at erd of 如p 4Onullduratiori of42soutput 砂 start of stag已 5OnUlloutput at end of stage
36、 5Ondlduration gf stage 51 14J11e+O06sl-lI-图35运行仿真10s,绘出结果。图36给出了阀芯位移随时间变化的情况以及通过载荷孔口的流量随阀芯位移的变化pooi diplcenenl ml图36注意:系统在两个方向都运动到了极限位置;在中间位置完全截断了流量。由此,回过头来看阀芯子模型 BAO011和BAO012。其中一个是另一个的镜 像。在当前的系统中,因为质量在中间,只有 BAO011是有用的。如果质量放 在左极限或右极限位置,两个模型都起作用。当前BAO011的参数设置见图37在零位移处的开口量是个很重要的参数,其默认值是0mm。图38给出了在零位
37、移处,开口量分别为0、正、负的三种情形。将两个阀芯子模型的这个参数 分别均设为1mm和-1mm,运行仿真,发现第二种情况下,会出现死区(dead-band 作用。另两个需要注意的参数是:对应于最小面积的开口量对应于最大面积的开口量TitleValueUMmdeK of hydraulic fluid0indeK of hydraulic fluid0spool diameter10mmrod diameter5mmmdmurn flow coeffcient0 7 nullcritical How number100 nullundetlap corresponding to sero dis
38、placement Orm undeflap corresponding to rnrumum rea0mmundedap corresponding to maKmnum diea 1 e+030 mm chamber length at zero drspiacemerit0 mmjet angle69 degreezero underlap图37positive underlapnegative underlap! (overlap)jet force coefficient0 ridl图38默认值,流通面积为0时的开口量为0,然后随着正开口量线性增加。第一个参数是开口量的下限,可能是由
39、泄漏或是一些固定的小孔口导致的;第二个参数是开口量的上限,可能是由于环形孔口经过某个孔,或是如图39所示,阀芯的移动造成环形孔口的全部打开。图39图40是这两个阀芯子模型的相关参数。注意对应于最小面积的开口量没有出现在这里,是因为模型的泄漏已经通过缝隙和圆形边界明确的计算出来了。将子模型BAO011换成BAO013,然后再运行仿真。会发现再阀芯处于中间位置时,负载孔口存在一个小流量。这里从 P到T液一直有少量泄漏。试着增大缝隙和圆形边界的半径,然后会发现增大这些参数会增大泄漏量皿VaJueUnitindex of hydraulic fkiid0口 ol diameter10 mmrod di
40、ameter5nmaximum flow coefficient07nullcritical fkw number100 nullundedap corresponding to zeio dispidcernent0 mmunderlap corresponding to maHimum area1 总*030 mmchjfnber length corresponding to zero di$口lacementOmmrounded corner radu0.005 mmclearance on diameter0.003mmjet force coeWicientOridl图40这个例子
41、的模型将所用问题都高度细化。对阀门的设计者来说是非常适用的,但对于更多的使用者来说,更简单的方法要更合适一些。然而许多情况下, 阀的动态特性及其控制系统近似为二阶传递函数,通过软件中提供的数据来定义这些参数。图41就是这样一个高度简化的系统。动态特性由一个二阶滞后提供,包括自然频率和阻尼系数;位移限制由一个饱和元件来实现;位移的最终值是不同的,并产生一个相应得速度;其他需要用来计算的量是子模型 BAO011和BAO012空间上的相关数据。2.5带移动缸体的液压缸通常得液压缸体是固定不动的或可假定为静止。然而,在其他情况下或是想 得到更符合实际的结果就有必要将缸体得运动考虑在内。HCD中的相对运
42、动子模型可以实现这一要求。可以用移动缸体来构建一个液压缸模型, 并与固定缸进行比较。系统如图42 所示。注意:在HCD中,不要把相对运动的子模型和绝对运动得子模型相混淆。相对运 动子模型在库中的标记处于下方,而绝对运动子模型的标记则在上方。HCD中相对运动的子模型的终点挡板都是弹性的。是因为在撞击中,两个 质量块是有限定的,有必要得到之间的撞击力液压腔连有两端口液压节点,作为HCD液压流动端口与标准 AMESim液压流动端口的分界©图42系统中下方的一个液压缸连有一弹性阻尼,再连一零速度源,这样就是一个 带有柔性装置的液压缸模型。同样还是选用模型选项中的第一个子模型,对其参 数进行设
43、置,然后运行仿真。图 43给出了运动和固定液压缸的活塞位移。xlO1412£一 4匚«>£«|0命一 d 祈Hp10fixed jack (solid)mobiL亡 jack (dashed)tune s 图433. 一般规则3.1介绍HCD库的设计是为了让用户能构建在标准 AMESim库中没有的单元,不需 要使用AMESet,不用编写程序代码。相对数量不多的基本元件却可用来构建大 量的单元。HCD突破了传统的模型构建技术,但又没有完全脱离。用户还是需 要有一定的机械基础,能够理解元件或系统工作的基本原理并能够对结果进行解 释和分析。此外还有两个技
44、术上的要求:理解输入、输出的关系对物理的理解,不需要很深的数学基础,只需能对重点问题作出解释。3.2输入、输出关系每一个单元符号代表一种子模型。一个子模型就是要收集一些量,也就是所 谓的输入;然后计算一些量,也就是所谓的输出。输入从何而来,来自其他子模 型的输出。图44模型之间通过端口相连,之间的关系的基本原则就是两个子模型要连接在一 起,其中一个提供另一个的输入量。 图44是原动机模型PM001和泵模型PU001 的一个连接。箭头表示流动的方向。轴的转速这个量是PM001的输出,也是PU001 的输入。T是扭矩,是PU001的输出,又是PM001的输入。两个模型都具有各 自需要的输入量。与之相比,图 45是尝试将孔口模型 0R000和单向阀CV000 连接到一起。两个模型都输出一个流量 Q
温馨提示
- 1. 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
- 2. 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
- 3. 本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
- 4. 未经权益所有人同意不得将文件中的内容挪作商业或盈利用途。
- 5. 人人文库网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
- 6. 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。
- 7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
最新文档
- 2025年胶合板行业现状分析:我国胶合板领域专利申请地区广泛
- 陕西省渭南市尚德中学2024-2025学年高一上学期第一次阶段性考试数学试卷(解析版)
- 湖北省恩施州高中教育联盟2024-2025学年高一上学期期末考试数学试题(解析版)
- 井点降水施工方案设计
- 2025年事故调查报告试题及答案
- 食品罐体保温施工方案
- 2025年药物检测员面试题及答案
- cmdb架构逻辑精讲
- 等距离特征映射降维算法研究故障检测
- 地震安标证书
- 外研版小学英语五年级下册课文翻译
- YY-T 1823-2022 心血管植入物 镍钛合金镍离子释放试验方法
- 年产12000吨水合肼(100%)项目环评报告书
- 钻芯法检测混凝土抗压强度原始记录1
- 液压支架与泵站(第二版)课件汇总全书电子教案完整版课件最全幻灯片(最新)
- 分布式光伏电站支架结构及荷载计算书
- GB∕T 37045-2018 信息技术 生物特征识别 指纹处理芯片技术要求
- DB61∕T 1186-2018 花椒主要病虫害防治技术规范
- DB32T 4013-2021 第三方社会稳定风险评估技术规范
- QC成果提高大跨度多节点曲面钢桁架一次安装合格率
- 作文指导——写一种小动物
评论
0/150
提交评论